




Die Küstenschifffahrt spielt in Europa eine große Rolle im Güterverkehr und soll in Zukunft noch weiter an Bedeutung gewinnen. Jedoch sind die Margen aufgrund der hohen Energie- sowie Betriebskosten und anfallenden Steuern relativ gering. Die Klassifikationsgesellschaft DNV GL 1 arbeitet an der Zukunft der Seeschifffahrt und hat für die Herausforderungen der Zukunft “ReVolt” entwickelt – ein Schiff, das ökologischer, intelligenter und sicherer als konventionell angetriebene und betriebene Schiffe sein soll.
Für “ReVolt” setzt DNV GL auf Technik, welche derzeit in einem frühen Entwicklungsstadium ist, jedoch die Zukunft maßgeblich prägen soll. Das Schiff wird rein elektrisch angetrieben und bezieht seine Energie aus einem Akku mit 3000 kWh Kapazität. Im Vergleich zu einem Schiffsdiesel kann der Elektromotor 60 Prozent der Energie in Vortrieb umsetzen. Bei einem konventionellen Dieselmotor wird in der Schifffahrt ein Wirkungsgrad von gerade einmal 15 Prozent erreicht. Zudem besteht der Elektroantrieb aus weniger wartungsintensiven Teilen – wie etwa rotierende Komponenten – und weist somit geringere Wartungskosten auf.
Der Antrieb besteht aus zwei Propellergondeln mit je einer Schiffsschraube (drei Meter Durchmesser). Hinzu kommt eine einziehbare Querstrahlsteueranlage. Der Rumpf besteht aus Stahl, da eine Leichtbauvariante aufgrund der geringeren Wasserverdrängung kleinere Schiffspropeller erforderlich gemacht hätte und somit die Gesamteffizienz des Schiffes gesunken wäre.

Der Schiffsentwurf ist für eine Durchschnittsgeschwindigkeit von 6 Knoten ausgelegt. Aufgrund der geringen Geschwindigkeit konnte das Schiff mit einem geraden, senkrechten Bug konstruiert werden und hat im Vergleich mit anderen Schiffen, die normalerweise mit einer Geschwindigkeit von 8,7 Knoten unterwegs sind, über das gesamte Profil einen geringeren Wasserwiderstand. Zudem muss das Schiff aufgrund seines Designs keine Ballasttanks vorhalten.
Der durchschnittliche Schiffswiderstand 2 bei normalem Wellengang und Wind beträgt 120 Kilowatt. Bei ruhiger See reduziert sich der Widerstand auf 50 Kilowatt.
Indem die Umschlagszeit in den Häfen vom Schiffsdesign auf etwa vier Stunden Liegezeit reduziert werden kann, ist der gesamte Zeitbedarf auch mit einer geringen Fahrgeschwindigkeit im Vergleich zu heute konventionell eingesetzten Schiffen wettbewerbsfähig. Für einen funktionierenden Schiffsbetrieb müssen die angefahrenen Häfen jedoch mit entsprechenden Ladestationen ausgestattet werden.
Das Schiff “ReVolt” ist eindeutig für den küstennahen Betrieb konzipiert. Der Akku speichert Energie für eine Reichweite von 100 Seemeilen, das sind umgerechnet 185 Kilometer. Mit einer Breite von 14,5 Metern und einer Länge von 60 Metern kann das Schiff maximal 100 Standardcontainer tragen und ist somit vergleichsweise klein. Das Konzept ist dennoch wirtschaftlich tragfähig.
Das Schiff entspricht mit seinen Eigenschaften hinsichtlich Reichweite und Tragfähigkeit den Eigenschaften der Schiffe, welche im Jahr 2012 in der Norwegian Economic Zone (NEZ) als Vorbild für das ReVolt analysiert wurden.

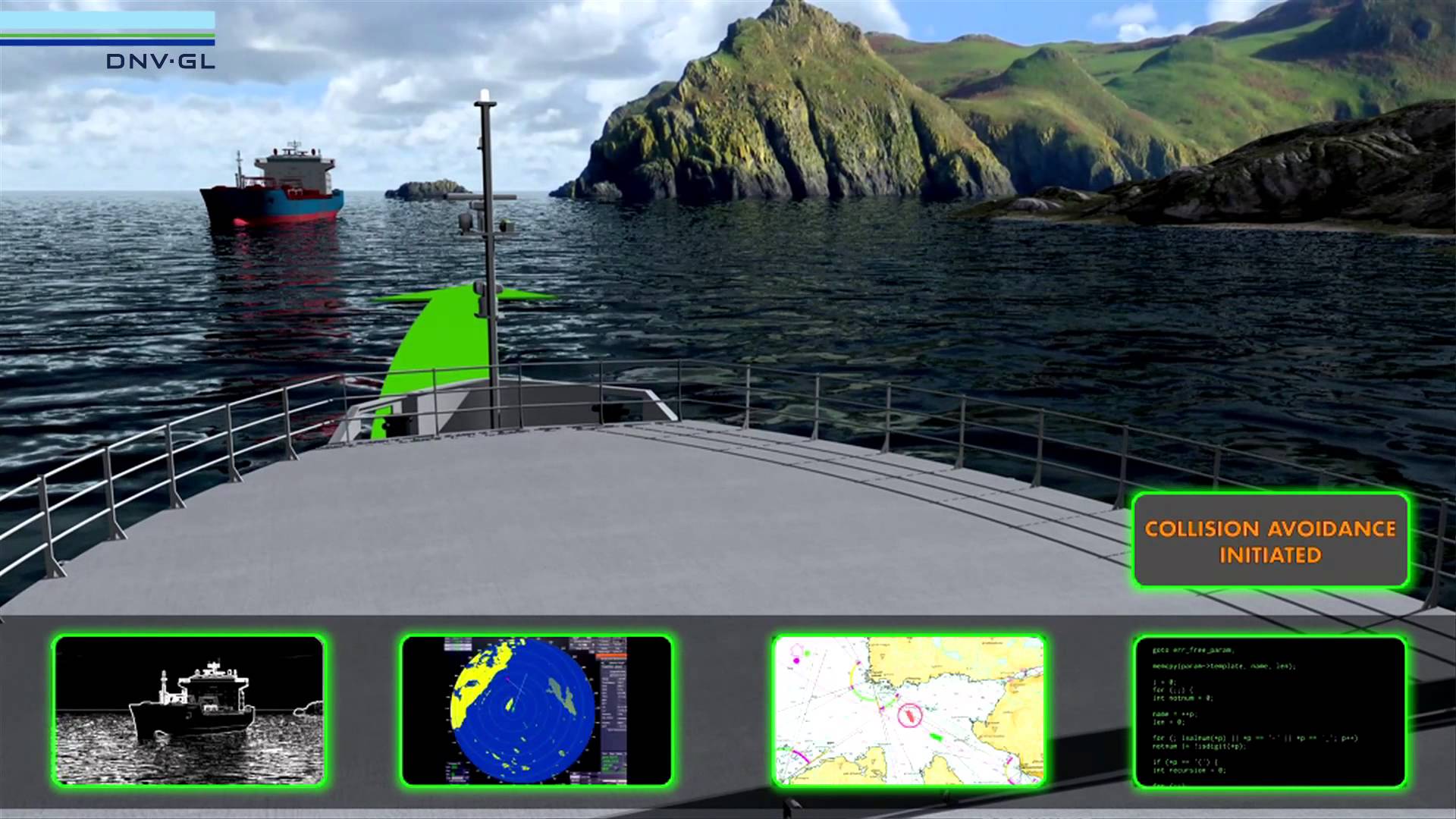
Durch die autonome Steuerung entfallen die Personalkosten und somit ein wesentlicher Faktor der Preisbildung im maritimen Transportwesen. Durch den Wegfall der Kommandobrücke steht darüber hinaus mehr Ladefläche zur Verfügung. Die autonome Steuerung eines Schiffes ist dabei keinesfalls trivial. Bei Seegang führt ein Schiff drei gradlinige und drei Rotationsbewegungen aus: Bewegung entlang der Längsachse (Wogen), Bewegung entlang der Querachse (Schwoien), Bewegung entlang der Hochachse (Tauchen), Bewegung um die Längsachse (Rollen), Bewegung um die Querachse (Stampfen) und Bewegung um die Hochachse (Gieren). Die Steuerung eines autonom fahrenden Schiffes muss daher in der Lage sein, Manöver und Entscheidungen vor dem Hintergrund dieser Eventualitäten zu treffen. Entscheidungen, welche an Land richtig wären, können auf See vollkommen falsch sein! Hinzu kommen Schwierigkeiten und Herausforderungen beim An- und Ablegen in Hafenbecken. Mir persönlich stellt sich zudem die Frage, wie das Schiff Kollisionen mit kleinen Schiffen, welche nicht mit einem AIS-Transponder ausgestattet sind oder nur geringe Reflektionsflächen für das Radar bieten, vermeiden soll. Zwar ist das Schiff mit ECDIS, GPS, Radar, Lidar und Kameras ausgestattet (siehe: Fahrzeugumfeldsensorik: LiDAR, Radar, Infrarot, Ultraschall und Video im Vergleich – Funktionsweise, Vor- und Nachteile, Sensordatenfusion. Die Ergebnisse aus dem Pkw-Bereich gelten bei der Umfeldsensorik ebenso für den Schiffsverkehr), jedoch müssen diese auch bei Nebel und schlechten Wetterverhältnissen zuverlässig und korrekt funktionieren. Eine große Herausforderung.
Diese und andere Fragen müssen noch geklärt werden, bevor “ReVolt” produktiv eingesetzt werden kann. Derzeit befindet sich das Konzeptschiff in der Testphase und wird als drei Meter langer Prototyp in einem Fjord bei Oslo getestet. Das Modellschiff ist jedoch noch nicht komplett autonom unterwegs.
Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google – Privacy & Terms.
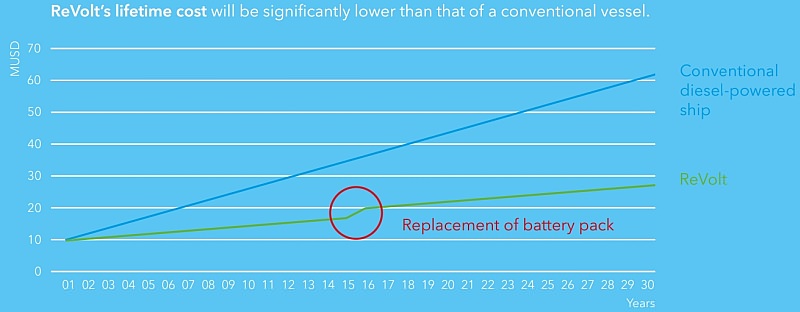
Mittelfristig soll “ReVolt” im short sea shipping eingesetzt werden. Eine schlagende Eigenschaft besitzt das Schiff im Vergleich mit heute eingesetzten Schiffen: Während einer rund 30-jährigen Lebensdauer soll ein ReVolt-Schiff durch seine geringen Personal- und Betriebskosten im Vergleich zu einem dieselbetriebenen Schiff bis zu 34 Millionen US-Dollar an Kosten einsparen. Und das trotz relativ hohen Batteriepreisen von 1.000 US-Dollar / kWh und einem zweimaligen Austausch des Batteriepacks über die Lebensdauer des Schiffs.
- Klassifikationsgesellschaften erstellen technische Richtlinien zum Entwurf und zur Konstruktion von Schiffen und geben diese als Bauvorschriften heraus, DNV GL ist aus der Fusion der Det Norske Veritas (DNV) mit der Germanischer Lloyd (GL) entstanden. ↩
- Der Schiffswiderstand gibt die Kraft an, die man aufwenden muss, um ein Schiff bei ruhiger See mit konstanter Geschwindigkeit zu ziehen. ↩








Derartige Konzepte für Roboterschiffe tauchen in jedem Jahrzehnt wieder neu auf, um dann still in der Schublade zu verschwinden. Der Grund für das Scheitern des im Prinzip richtigen Ansatzes liegt im Konservatismus, der der Seefahrt wie kaum einem anderen Verkehrsträger innewohnt.
Die Widerstände sind groß und selten technischer Natur:
1. Die internationale Seestraßenordnung müsste für den Einsatz dieser Schiffe geändert werden. Diese gelingt nur durch einen einstimmigen Beschluss der International Maritime Organization (IMO), die von den Flaggenstaaten dominiert wird. Die Staaten mit den größten Flotten sind von den Schiffsbetreibern abhängig, deren Flaggengebühren einen nicht unerheblichen Teil des BSP dieser meist kleinen Staaten ausmacht. Die Schiffsbetreiber wiederum haben kein Interesse an Innovationen, wie dem ReVolt-Schiff, da sie zum Bau zusätzliches Kapital benötigen. In Zeiten in denen zu viele, in den Boom-Jahren bis 2008 aufgelegte Schiffe auf den Markt drücken und die Frachtraten im Keller sind, die Schiffe also niedrige bis null Rendite erwirtschaften, ist dieses Kapital sehr schwer zu beschaffen. Das Eigenkapital auch noch so fortschrittlicher Reeder reicht dazu nicht aus, wie das Beispiel der Beluga Reederei aus Bremen belegt.
2. Das SOLAS (Safety Of Life At Sea) Regelwerk schreibt Sicherheitsmaßnahmen vor, die der Rettung von Menschenleben auf See dienen. Wie Schiffe ähnlich ReVolt dabei eine Rolle spielen können, wird in dem Konzept nicht erläutert. Ich kann nicht erkennen, wie ein ReVolt-Schiff der Besatzung eines mit Menschen besetzten Seefahrzeuges zu Hilfe kommen kann, wozu es aber laut SOLAS verpflichtet ist. Hier muss nachgebessert werden, bevor die IMO diesem Konzept zustimmen kann.
3. Die automatische Steuerung von Roboterschiffen ist auf dem Papier gelöst. Wer aber zur See gefahren ist, kennt die unglaubliche Aggressivität der maritimen Umwelt. Korrosion durch Salzwasser ist selbst bei den modernsten Anlagen ein ungelöstes Problem. Elektrik allgemein ist hier insbesondere anfällig. Wer glaubt, dass ein Seeschiff ohne ständige Erneuerung dreißig Jahre im Einsatz bleibt, sitzt am Schreibtisch. Die heutigen Schiffe werden bereits nach max. 15 Jahren verschrottet, weil sich der Erhalt nicht mehr lohnt.
4. Zur automatischen Steuerung eines Schiffes gehört vor allem eins: Eine aktuelle, maschinenlesbare Karte. Die gibt es trotz aller Beteuerungen der Internationalen Hydrographischen Organization (IHO), die bei der IMO akkreditiert ist, bis heute nicht. Nationale Alleingänge selbst der europäischen Küstenstaaten haben dazu geführt, dass zwischen den angrenzenden Karten eklatante Brüche herrschen und die Aktualität mehrere Wochen bis Jahren hinter der Realität hinterher hinkt. Strandungen und Kollisionen aufgrund fehlerhafter Angaben in den Karten sind vorprogrammiert. Erfahrene, nautische Offiziere kennen diese Fallen in den Karten und fangen kritische Situationen täglich ab. Solange die IHO ihre internen Schwierigkeiten nicht überwunden hat, würde ich mit ReVolt keine gefährlichen Güter transportieren wollen, was die Wirtschaftlichkeit dieses Konzeptes weiter in Frage stellt.
Sie sehen also: Nette Idee, gut geeignet, um wieder einmal einige EU-Projekte loszutreten, das Ansehen des DNV als Technologieförderer aufzupolieren und die Gelder für teure Reisen zu Kongressen in exotischen Städten locker zu machen. Aber auch das muss ja sein, die Welt muss sich weiter drehen.
Hallo Herr Büttgenbach,
Vielen Dank für Ihren fundierten und kritischen Kommentar! Mir persönlich fehlt leider das Hintergrundwissen im Seeverkehr, um derartige Schlüsse wie Sie ziehen zu können. Daher nochmals mein Dank für die Einordnung.
Viele Grüße,
Martin Randelhoff