



Im Rahmen des Fachsymposiums 2017 des Allgemeinen Deutschen Fahrrad-Club e.V. (ADFC) in Berlin habe ich in einem Vortrag das Verhältnis zwischen automatisierten Kraftfahrzeugen und dem Radverkehr zu beleuchten versucht.
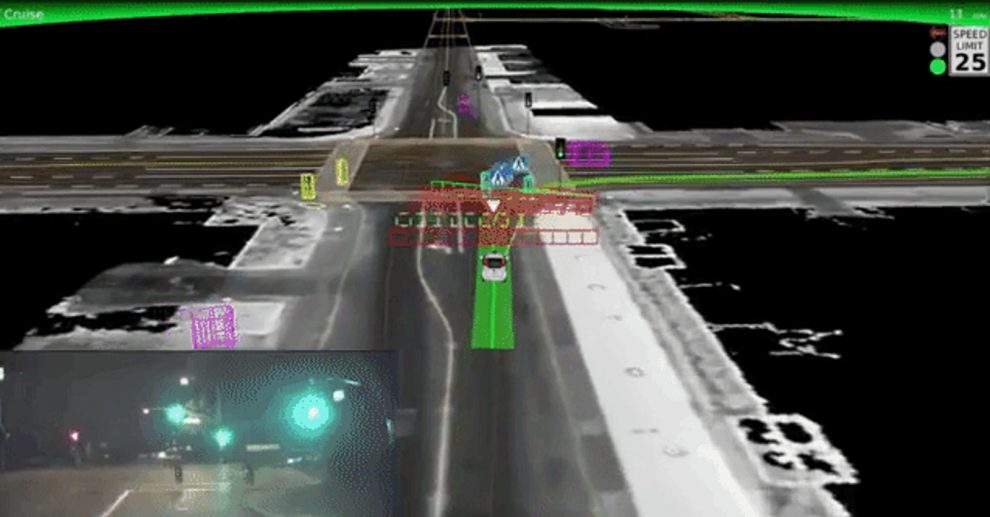
Die Detektion und Reaktion von Radfahrenden ist eine Herausforderung, da sie schnell, agil und wendig sind, keine Blinker haben, sich manchmal wie Fahrzeuge verhalten, manchmal wie Fußgänger und mitunter unberechenbar sind.
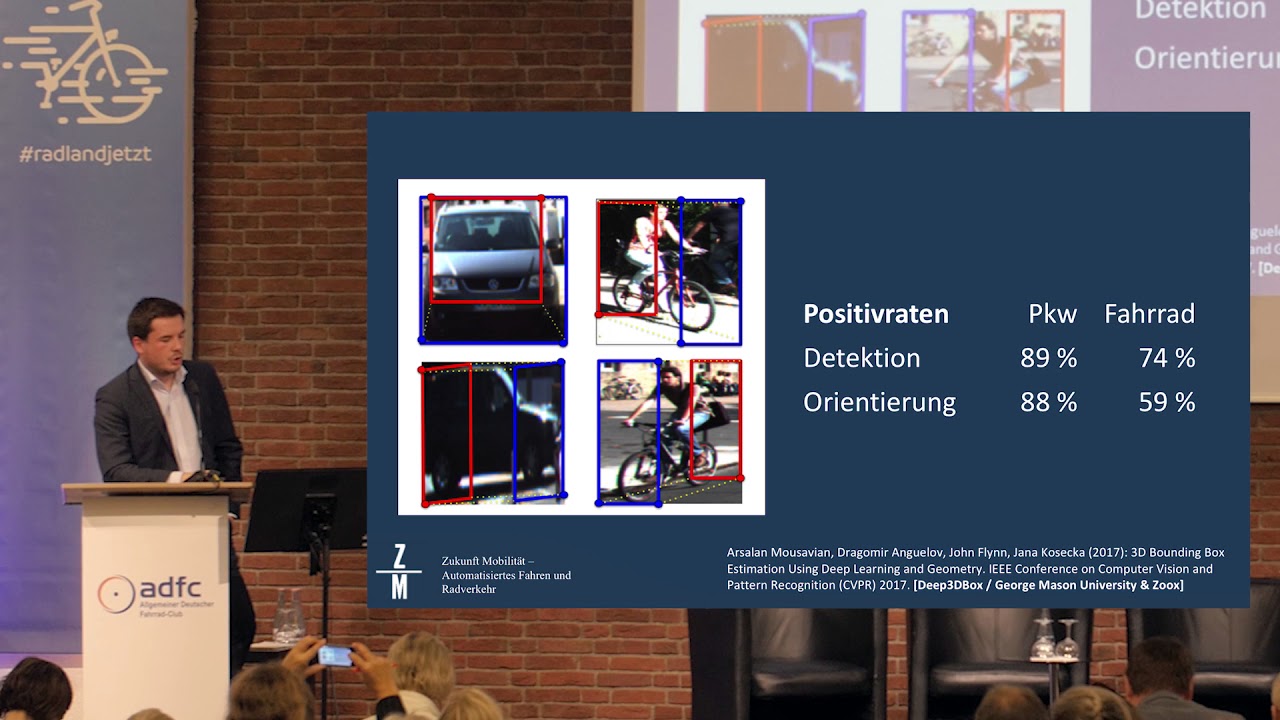
Zurzeit (2017) sind die Detektionsraten von Radfahrenden noch nicht befriedigend und bedürfen für eine uneingeschränkte Straßenzulassung einer starken Verbesserung.1 Dennoch kann der Radverkehr stark von einer Automatisierung des Kfz-Verkehrs profitieren, da die einprogrammierten Regeln die Belange des Radverkehrs stärker berücksichtigen und die Regeltreue höher ist.
when our sensors detect a parallel-parked car with an open door near a cyclist, our car is programmed to slow down or nudge over to give the rider enough space to move towards the center of the lane and avoid the door.
We also aim to give cyclists ample buffer room when we pass, and our cars won’t squeeze by when cyclists take the center of the lane, even if there’s technically enough space. Whether the road is too narrow or they’re making a turn, we respect this indication that cyclists want to claim their lane.
Neben einer kurzfristigen Perspektive bin ich auch auf die möglichen längerfristigen Folgen einer Fahrzeugautomatisierung insbesondere bei höheren Automatisierungsgraden eingegangen [ab Minute 14:30]. Auf Basis des konstanten Reisezeitbudgets sind Auswirkungen auf die Fahrleistung, den Energiebedarf und die Umweltwirkungen des Verkehrs zu erwarten. Darüber hinaus dürfte es langfristig zu Anpassungen in der gebauten Struktur und den Nutzungen kommen. Ebenfalls sind Veränderungen bei der Ausgestaltung der rechtlichen Rahmenbedingungen, der Straßenraumgestaltung und der Flächenverteilung in einer Stadt zu beobachten, um dem Entstehen einer “autogerechten Stadt 2.0” vorzubeugen.
Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google – Privacy & Terms.
Der verwendete Foliensatz steht hier zum Download bereit [PDF, 1,7 MB].
PS: Das Wort “sozusagen” wird zeitnah aus meinem Wortschaft verbannt.
- Arsalan Mousavian, Dragomir Anguelov, John Flynn, Jana Kosecka (2017): 3D Bounding Box Estimation Using Deep Learning and Geometry. IEEE Conference on Computer Vision and Pattern Recognition (CVPR) 2017. ↩









Hallo Martin! Ein interessanter Vortrag. Aus meiner Sicht ist jedoch die Quelle (CVPR Paper) für die Detektionsraten für Radfahrer nicht richtig wiedergegeben worden. Du erweckst bei 6:50 den Eindruck, die dargestellten Werte seien “was die Technologie […] wirklich kann”. Das ist lässt sich aus der Quelle nicht ableiten:
– Es wird entgegen deiner Aussage nicht eine Stereo-Kamera und Radar, sondern lediglich eine Monokamera verwendet. Ich würde davon ausgehen dass das Ergebnis mit mehr Sensoren besser ist, beispielsweise die Posenschätzung mit einer Stereokamera, die Detektion von Autos mit Radar oder die Fahrraderkennung mit Laser.
– Im Paper wurden Einzelbilder unabhängig voneinander analysiert. In der Realität hat man Sequenzen und kann eine robustere Erkennung erreichen indem man die Historie berücksichtigt. Beispielsweise könnte man die Bewegungsrichtung damit ableiten oder false-negatives korrigieren.
– Es wurde mit dem KITTI Datensatz gelernt der deutlich weniger Fahrradfahrer als Autos beinhaltet. Im Paper wird ausdrücklich erwähnt dass dies eigentlich zu wenig Trainingsdaten sind. Zwar zählt am Schluss das Ergebnis, aber es ist davon auszugehen, dass OEMs mehr Trainingsdaten zur Verfügung stehen da dies im Grunde nur eine Kostenfrage ist.
Das soll nicht heißen, dass das Problem gelöst ist, aber ich denke die Technologie ist weiter als man an der Tabelle ablesen kann. Besonders interessant für die Zukunft finde ich die Herausforderungen bei der Interaktion mit Fahrradfahrern. Selbst wenn man Gesten (oder gar Mimiken) erkennen kann, muss man diese im Kontext auch korrekt interpretieren und dies angemessen zurückmelden. Was ich gelernt habe ist, dass dem automatisierten Fahrzeug Dinge oft leicht fallen die dem menschlichen Fahrer große Schwierigkeiten bereiten, aber es auch viele Situationen gibt die der Mensch mit Intuition und seiner Erfahrung leicht löst, die die Automation aber vor große Herausforderungen stellt.