




Dies ist ein Gastartikel von Friedemann Kallmeyer. Wenn auch Sie Interesse haben, hier einen Gastartikel zu veröffentlichen, dann schreiben Sie mir bitte.
1. Einleitung
Zunehmend geraten Schlagzeilen zu automatisierten Fahrzeugen in die Medien. Gravierende Unfälle unter Beteiligung von technischen Systemen beim Führen eines Fahrzeugs, Erfolgsmeldungen und Errungenschaften verschiedener Hersteller werden dabei thematisiert.
Die Betrachtung der öffentlichen Debatte zur Automatisierung von Fahrzeugen, weist eine gewisse Unschärfe in den verwendeten Begrifflichkeiten auf. Zunächst ist deshalb eine klare Definition des verwendeten Begriffs „autonomes Fahren“ erforderlich. Zur Einordnung des Begriffs dienen die definierten Automatisierungsgrade (siehe Kapitel Automatisierungsstufen in Automatisierung des Straßengüterfernverkehrs).
Diese Arbeit betrachtet ausschließlich die Chancen und Herausforderung des fahrerlosen Fahrens im Sinne des Automatisierungsgrads Stufe 5. Die Begriffe „fahrerloses Fahren“ und „autonomes Fahren“ werden synonym verwendet. Als Vergleich dient das „konventionelle Fahrzeug“, das einen Fahrzeugführer benötigt, also höchstens die Automatisierungsstufe 3 aufweist und mit dem Bild eines derzeitigen Personenkraftwagens (PKW) im Straßenverkehr deckungsgleich ist.
Autonome Straßenfahrzeuge weisen die größten Potentiale und Problemstellungen auf. Deshalb bilden sie den Schwerpunkt der Betrachtung.
Es sei darauf hingewiesen, dass in Bezug auf die Chancen und Herausforderungen des autonomen Fahrens kein Anspruch auf Vollständigkeit bestehen kann. Da die Technologie noch nicht in vollem Umfang zur Verfügung steht, sind Auswirkungen noch nicht absehbar und können somit nicht benannt werden. Auch ist der Umfang dieser Arbeit begrenzt, sodass eine Selektion obligatorisch ist.
1.1 Kategorisierung
Die Chancen und Herausforderungen des autonomen Fahrens sind nach ihren Primärwirkungen folgenden Kategorien zugeordnet: Ethik, Gesellschaft, Infrastruktur, Ökonomie, Ökologie, Psychologie, Recht, Sicherheit, Technik und Verkehr.
Zudem haben diese auch Auswirkungen auf zweite und dritte Kategorien (Sekundär-, Tertiärwirkung). Diese Wirkungen gilt es ebenso zu beachten, sie nehmen jedoch keinen Einfluss auf die Strukturierung. Beispielsweise ist die Entwicklung eines Systems zur Fahrzeugführung vorwiegend eine technische Herausforderung. Diese nimmt aber, je nachdem wie zuverlässig das System die Fahraufgabe ausführt, zugleich auch Einfluss auf die Sicherheit im Straßenverkehr (Sekundärwirkung: Kategorie Sicherheit).
In Kapitel 2 werden aufeinander aufbauend zunächst gesellschaftliche Vorteile, dann positive Wirkungen auf die Ökonomie und Ökologie, den Verkehr und die Sicherheit der Technologie aufgezeigt.
Mit zunehmendem Schweregrad werden in Kapitel 3 Herausforderungen des autonomen Fahrens von der Technik, zu Herausforderungen des Verkehrs, der Infrastruktur und Sicherheit über Probleme der Psychologie, Ökonomie und Ökologie bis hin zu ethischen und gesellschaftlichen Fragestellungen thematisiert.
2. Chancen des autonomen Fahrens
Die Chancen des autonomen Fahrens lassen sich wesentlich von der Eigenschaft ableiten, dass kein Fahrer zur Bewegung des Fahrzeugs benötigt wird und der Insasse nun mit der Rolle eines beispielsweise passiven Bahnpassagiers vergleichbar ist.
Im Zusammenhang damit steht das sogenannte Valet-Parking1: Das Fahrzeug muss nicht vom Nutzer selbst abgestellt werden, da es sich selbstständig zu einer geeigneten Parkposition begeben und dort einparken kann.
Mit dem Wegfall des Fahrers kann zudem eine geringere Reaktionszeit bei fahrerlosen Fahrzeugen als bei konventionellen Fahrzeugen mit menschlichem Fahrer realisiert werden. Brems- und Anfahrzeiten der Fahrzeuge werden damit verkürzt.
2.1 Verstärkte Teilnahme von Mobilitätseingeschränkten am gesellschaftlichen Leben
Mit dem fahrerlosen Fahren besteht für Personen mit eingeschränkter Mobilität und verminderter Fähigkeit zur aktiven Teilnahme am Straßenverkehr (zum Beispiel aufgrund von Alter, Behinderung, Medikamentenkonsum) die Möglichkeit, am allgemeinen Mobilitätsleben verstärkt teilzunehmen.2 Ebenso bekommen Personen ohne Fahrerlaubnis für ein konventionelles Fahrzeug, zum Beispiel Jugendliche oder alte Menschen, durch autonome Fahrzeuge die Option der Partizipation am motorisierten Straßenverkehr.3
Diese Personengruppen erhalten also die Chance einer erhöhten Mobilität4 und damit mehr soziale und gesellschaftliche Teilhabe. Gerade in Zeiten des demographischen Wandels mit einer steigenden Zahl von mobilitätseingeschränkten Personen ist diese Wirkung von Bedeutung.
Für die Hersteller und Betreiber von autonomen Fahrzeugen bedeutet das eine größere Nutzer- und Kundengruppe als bei Straßenfahrzeugen bisher.
2.2 Nutzung der gewonnenen Zeit
Da der Fahrer eines Fahrzeugs die Zeit während seines Ortswechsels bisher für die Fahraufgabe verwenden musste, gewinnt er mit dem fahrerlosen Fahren diese Zeit. Die Brutto-Fahrzeit ist somit nur noch mit einer deutlich verringerten Netto-Zeitbelastung verbunden5. Für den Nutzer des autonomen Fahrzeugs steht nun ein Großteil seiner Fahrzeit für andere Aktivitäten zur Verfügung.
Bei derzeit mehr als 1,2 Milliarden täglichen PKW-Nutzern könnte damit die durchschnittliche Fahrzeit von 50 Minuten pro Tag nutzbar werden.6
Für Kommunikationsanbieter, wie Google, Apple, Facebook etc., besteht darin ein großes Potenzial: Den Fahrzeuginsassen steht zunehmend Zeit für ihre Dienste zur Verfügung. Weltweit bedeutet jede zusätzliche Minute im PKW, in der ungestört das mobile Internet genutzt werden kann, ein Umsatzpotenzial von fünf Milliarden Euro jährlich.7
Berufspendler bekommen mit autonomen Fahrzeugen die Möglichkeit, ihre Arbeitstätigkeit bereits auf dem Weg zum Arbeitsort zu beginnen. Das Pendeln mit dem PKW gewinnt damit an Attraktivität.
2.3 Rationalisierung
Das fahrerlose Fahren ermöglicht erstmalig eine „Automatisierte Leerfahrt“, bei der ein Fahrzeug auch ohne Fahrer bewegt werden kann, was bisher nach konventioneller Technologie nicht möglich war.8
Hervorgerufen durch die Einsparung eines Fahrzeugführers und den damit verbundenen Kosten ergeben sich Rationalisierungseffekte im Mobilitätssektor und Warenlieferverkehr.
2.3.1 Mobilitätssektor
Mit dem fahrerlosen Fahren können Mobilitäts- und Transportdienste realisiert werden, für die bisher Berufsfahrer nötig waren und deren Umsetzung wegen hoher Kosten unwirtschaftlich war.9 Die wirtschaftliche Grenze wird, verursacht von der Rationalisierung der Technologie des autonomen Fahrens, deutlich herabgesetzt.
Dies ermöglicht vor allem im öffentlichen Verkehr und beim Car-Sharing deutliche Einsparpotenziale.
Im Vergleich zu den Lohnkosten eines Fahrers sind die Kosten für die Ausstattung eines Fahrzeugs mit dem System für das fahrerlose Fahren bereits nach deutlich weniger Betriebsmonaten amortisiert.10 Damit wird die Zahl der als Fahrpersonal beschäftigten Personen zurückgehen11 und dies die betriebswirtschaftliche Effizienzsteigerung des öffentlichen Verkehrs nach sich ziehen.12 Das autonome Fahrzeug bedeutet für den öffentlichen Verkehr einen kostensenkenden technologischen Fortschritt.13
Das ermöglicht den Betreibern des öffentlichen Verkehrs die Erschließung neuer Bediengebiete und die Erstellung eines kundenorientierteren Angebots (siehe Kapitel 2.5.2: Individualisierung und Flexibilisierung des öffentlichen Verkehrs).
Beim Car-Sharing wird vor allem die Möglichkeit des Valet-Parkings einen wesentlichen Einfluss auf die Wirtschaftlichkeit haben. Grundsätzlich entfällt damit die Notwendigkeit von kostenintensiven Flächen an attraktiven Standorten für Ausleih- und Abgabestationen von Sharing-Fahrzeugen.
Auch kann die Attraktivität für Nutzer des Car-Sharings mit autonomen Fahrzeugen gesteigert werden, was für die Anbieter Kundenzuwachs und damit mehr wirtschaftliches Potenzial bedeutet. (siehe Kapitel 2.5.1: Car-Sharing: Valet-Parking)
2.3.2 Warenlieferverkehr
Durch den Entfall von Ruhezeiten und die Rationalisierung durch weniger Lohnkosten besteht beim Gütertransport mit autonomen Fahrzeugen die Chance der verstärkten Effizienz von Transportleistungen.
Automatisierte Leerfahrten lassen im fahrerlosen Warenlieferverkehr „Autonome Rollcontainer“ auf der Straße entstehen14, ähnlich den unbemannten Lieferdrohnen der Luft. Der Weg vom Warenwunsch des Kunden bis hin zur physikalischen Warenlieferung lässt sich somit vollständig automatisieren15 und fahrerlos umsetzen.
Es besteht zudem das Potenzial, den städtischen Warenlieferverkehr auf Zeiten zu verlagern, in denen die Infrastruktur weniger belastet ist. Der Warenlieferverkehr wird damit stadtverträglicher und effizienter. Bei geräuscharmer Ausgestaltung ließe sich das Geschäft sogar in die Nacht verlagern.16
In Spitzenzeiten wird so die bestehende Infrastruktur weniger durch den Warenlieferverkehr belastet, kann effizienter und über den Tag gleichmäßiger genutzt werden.
2.4 Reduzierte Umweltauswirkungen
Die Umweltauswirkungen autonomer Fahrzeuge werden geringer eingeschätzt als die von Fahrzeugen mit menschlichem Fahrer. Grund dafür ist die Reduzierung oder sogar Eliminierung von Überbelastung der Infrastruktur, die Reduzierung erhöhter Umweltauswirkungen durch Stau und den Energieverbrauch im Leerlauf.17 Auch bieten technisch optimierte Fahrvorgänge die Möglichkeit, den Energiebedarf und Emissionsausstoß der Fahrzeuge zu verringern.
Der autonome Straßenverkehr könnte damit stadtverträglicher werden.18
Auch ist die Technologie gut für den Einsatz von umweltfreundlichen Fahrzeugen mit alternativen, zum Beispiel batterie-elektrischen, hybriden oder wasserbasierenden, Antrieben geeignet19, da Lade- oder Betankungsvorgänge (etwa beim Car-Sharing) systemseitig geplant und rechtzeitig berücksichtigt werden können.
Allumfassend hat die Technologie die Chance, auf das Mobilitätsverhalten von Personen Einfluss zu nehmen und damit bei positiver Anreizbildung und Kontrolle der Rebound-Effekte (siehe Kapitel 3.8) die Umweltbelastung durch den Verkehr zu reduzieren.
2.5 Verkehrliche Auswirkungen
Das autonome Fahrzeug kann sowohl Anwendung in bereits vorhandenen Verkehrssystemen wie dem Car-Sharing und dem öffentlichen Verkehr, als auch Anwendung als eigenständiges Verkehrsmittel im Sinne eines Individualfahrzeugs finden. In beiden Einsatzfeldern hat das autonome Fahren einen positiven Einfluss.
2.5.1 Car-Sharing: Valet-Parking
Mit dem Valet-Parking kann sich das Car-Sharing Fahrzeug selbst vom Nutzer zum Parkplatz und umgekehrt vom Parkplatz zum Nutzer bewegen. Damit sinkt der Beschaffungsaufwand für ein Fahrzeug deutlich.20
War bisher die Suche nach einer vom Anbieter definierten Abstellfläche für das Fahrzeug nötig, so kann der Nutzer das autonome Fahrzeug nun am gewünschten Zielort verlassen. Das Fahrzeug kehrt selbstständig zu einem geeigneten Standort zurück.
Da so bisherige Zu- und Abgangszeiten entfallen, wird die für Mobilität aufgewendete Zeit verkürzt. Es entsteht eine Art Tür-zu-Tür-Service.21
Die Attraktivität des Car-Sharings erhöht sich damit deutlich.
Für die Car-Sharing-Anbieter besteht mit dem Einsatz von fahrerlosen Fahrzeugen die Chance, das Angebot vollständig zu flexibilisieren. Stationen im Sinne des stationsbasierten Car-Sharings werden damit überflüssig. Zwar wird es weiterhin zentrale Orte (Depots) für die Fahrzeugwartung und -instandhaltung geben müssen, jedoch entfallen die Kosten für Parkraum an wichtigen und zentralen Kundenstandorten, die als Abhol- und Abstellort genutzt wurden.22
2.5.2 Individualisierung und Flexibilisierung des öffentlichen Verkehrs
Autonome Fahrzeuge im öffentlichen Verkehr bieten vor allem große räumliche und zeitliche Flexibilität.23 So sind durch den Wegfall des Fahrers dem Fahrzeug keine Grenzen mehr bei der Einsatzzeit gesetzt. Auch ist ein bedarfsorientierterer Einsatz von Fahrzeugkapazitäten möglich.
Der öffentliche Verkehr erhält somit die Möglichkeit der bedarfsangepassten Bedienung24 und die Chance, Kundenbedürfnissen besser gerecht zu werden.25
Zusammen mit der Rationalisierung im Mobilitätssektor verändert sich damit die Kalkulationsbasis für Unternehmen im öffentlichen Verkehr wesentlich.26
Es besteht die Chance, auch in Schwachlastzeiten oder auf Relationen schwacher Nachfrage das Erreichen von Hauptachsen des öffentlichen Verkehrs durch Zubringer-Systeme und Shuttle-Dienste von fahrerlosen Fahrzeugen zu gewährleisten27, was bisher aufgrund fehlender Wirtschaftlichkeit nicht möglich war.
Dies bietet insbesondere für Stadtrand- und flächenhafte Siedlungsgebiete, für suburbane, einwohnerschwache und ländliche Räume eine verbesserte Anbindung durch den öffentlichen Verkehr.28 Dadurch ist auch eine Verringerung der Zahl an PKW-Fahrten und ein reduzierter Besitz an Individualfahrzeugen in diesen Gebieten denkbar.
2.5.3 Gesteigerte Kapazitäten: Effizientere Nutzung bestehender Infrastruktur
Autonome Fahrzeuge bieten die Chance der effizienteren Ausnutzung der bestehenden Infrastruktur und vorhandenen Kapazität.29 Innerorts geschieht das durch Reduktion von Zeitlücken und auf Autobahnen durch höhere Geschwindigkeiten von Fahrzeugpulks.30
2.5.3.1 Reduktion von Zeitlücken
Autonome Fahrzeuge können die Fahrmanöver anderer Fahrzeuge besser antizipieren und ihr Verhalten entsprechend schneller adaptieren. Grund dafür ist vor allem eine geringere Reaktionszeit bei fahrerlosen Fahrzeugen als bei konventionellen Fahrzeugen mit menschlichem Fahrer.
Ein Teil der bisher zu geringen Zeitlücken wird somit nutzbar. Vorhandene Zeitlücken, wie sie beispielsweise beim Linksabbiegen notwendig sind, können effizienter verwendet werden. Auch sind höhere Räumgeschwindigkeiten und ein zügigeres Anfahren mit fahrerlosen Fahrzeugen möglich, was die Sperrzeiten an Lichtsignalanlagen verringert und größere Freigabezeiten erlaubt.31
Der Effekt der Reduktion von Zeitlücken wirkt sich vor allem innerorts an Knotenpunkten aus. Hier wird mit einer Kapazitätserhöhung von etwa 40% bei rein autonomen Verkehr gerechnet. Bei Hybrid-Verkehr32 wird der Wert voraussichtlich geringer ausfallen. Verbesserungen können aber aufgrund der verringerten Reaktionszeit bereits ab dem ersten autonomen Fahrzeug auftreten.33
2.5.3.2 Höhere Geschwindigkeit in Fahrzeugpulks
Durch die verringerte Reaktionszeit autonomer Fahrzeuge reduziert sich der Zeitbedarf beim Bremsvorgang. Der Fahrzeugabstand auf Autobahnen kann somit verringert werden, eine rechtliche Legitimation vorausgesetzt.34 Besonders wirkt dieser Effekt zwischen miteinander kommunizierenden autonomen Fahrzeugen, da Bremsmanöver früher eingeleitet werden können.
Auch sind höhere Geschwindigkeiten in Fahrzeugpulks bei gleichbleibender Sicherheit aufgrund der technisch optimierten Bremsvorgänge möglich.
Dadurch kann bei konstanter Dichte des Verkehrs eine größere Verkehrsstärke am Querschnitt realisiert werden.35 Auf Autobahnen ist damit eine Kapazitätssteigerung um etwa 80% möglich.36 Jedoch sind hier wesentliche Veränderungen erst bei nahezu rein autonomen Verkehr zu erwarten.
2.6 Umgestaltung des Verkehrssystems und Reduktion der Verkehrsfläche
Mit der technischen Steuerung autonomer Fahrzeuge ist im Vergleich zum menschlichen Fahrer eine präzisere Ausführung der Lenk- und Fahraufgabe möglich.
Zusatzbreiten bei Fahrstreifen für die Lenktoleranz können bei rein autonomem Verkehr entfallen und die Verkehrsfläche so insgesamt reduziert werden.37
Zudem besteht die Chance, den Platzbedarf in Innenstädten zu verringern. Mit dem Valet-Parking kann außerhalb der Stadtzentren geparkt werden, unabhängig vom Fahrtziel des Nutzers. Auch können die Stellplätze für autonome Fahrzeuge schmaler werden, da diese technisch bedingt genauer einparken können als der menschliche Fahrer und kein Raum für sich öffnende Türen zum Aussteigen vorgehalten werden muss.
So kann ein Parkplatz für autonome Fahrzeuge mit Valet-Parking etwa 15 % schmaler sein als Stellflächen für ein herkömmliches Fahrzeug.38
2.7 Einfluss: Verkehrssicherheit
Auswertungen der Verkehrsunfallforschung ergeben menschliches Versagen als Hauptunfallursache. So sind im Jahr 2015 in Deutschland 88% der Unfälle auf ein Fehlverhalten von Fahrzeugführern zurückzuführen.39
Somit scheint eine deutliche Verbesserung der Verkehrssicherheit durch autonome (fahrerlose) Fahrzeuge erreichbar, da menschliches Fehlverhalten eines Fahrers ausgeschlossen werden kann.
Jedoch fallen die Aussagen zur Verkehrssicherheit von fahrerlosen Fahrzeugen verschiedener Experten (-gruppen) unterschiedlich aus: „Durch den Einsatz […] autonomer Fahrzeuge ergeben sich vor allem Möglichkeiten, die Sicherheit im Straßenverkehr zu erhöhen“.40 „Die Sicherheit von autonomen Fahrzeugen kann in der Theorie als nahezu vollständig gegeben angesehen werden“.41
Laut des wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur hingegen ist vor einer Markteinführung nicht nachzuweisen, dass das Risiko des autonomen Fahrens geringer sein wird als das Vergleichsrisiko des heutigen Straßenverkehrs.42
Der Grund für diese unterschiedlichen Aussagen liegt in der hohen Zahl von Annahmen, beispielsweise zur zukünftigen Marktdurchdringung autonomer Fahrzeuge, die in bereits heute existierenden Prognosen bestehen.43
Aussagen zur Gesamtentwicklung der Verkehrssicherheit durch autonome Fahrzeuge scheinen nur schwer machbar zu sein, da mit der Komponente “Maschine” neue Unfallkonstellationen entstehen und technische Herausforderungen die Prognosen erschweren.44 So müssen autonome Fahrzeuge beispielsweise zunächst die Wahrnehmung und Interpretation komplexer Verkehrssituationen lernen, bevor sie die Leistungsfähigkeit eines menschlichen Fahrers übersteigen und eine Verbesserung der Sicherheit im Straßenverkehr erreichen können.45 Zurzeit ist somit noch nicht absehbar, ob autonome Fahrzeuge sich im Straßenverkehr sicherer verhalten können als Fahrzeuge mit einem mittelalten und erfahrenen menschlichen Fahrer.46
Wenn weniger Annahmen getroffen werden müssen und weitere Details zur technischen Ausstattung der Systeme eindeutig sind, werden sich die Auswirkungen auf die Verkehrssicherheit mit zunehmender Weiterentwicklung der Technologie besser abschätzen lassen.47
3. Herausforderungen des autonomen Fahrens
Nach den Chancen gilt es die Herausforderungen zu betrachten, da diese überwiegend Bedingungen für die Einführung der Technologie darstellen und damit Voraussetzungen für die Ausnutzung der Vorteile des autonomen Fahrens schaffen.
Wesentlich stammen die Herausforderungen von der folgenden Eigenschaft autonomer Fahrzeuge ab: Das fahrerlose Fahrzeug benötigt strikte Vorgaben, wie es sich zu jeder Zeit im Straßenverkehr zu verhalten hat. Diese Anweisungen werden dem Fahrzeug implementiert und konsequent ausgeführt.
Eine besondere Betrachtung gilt dem Zustand des Hybrid-Verkehrs, in dem sich autonome und konventionelle Fahrzeuge im Verkehr gleichzeitig bewegen.
3.1 Entwicklung des Systems zur autonomen Fahrzeugführung
Von zentraler Bedeutung ist bei einem fahrerlosen Fahrzeug das System zur autonomen Fahrzeugführung, das die Fahraufgabe des menschlichen Fahrers übernimmt.
Neben der eigentlichen Entwicklung des Systems ergeben sich auch Anforderungen an die Sicherheit.
3.1.1 Entwicklungstechnische Anforderungen
Das Geschehen im Straßenverkehr ist aufgrund der Vielzahl von Verkehrsteilnehmern und deren Fortbewegung durch eine hohe Dynamik charakterisiert. Dies gilt als eine große Herausforderung für ein Fahrzeugführungssystem.
Da es die Fahraufgabe des fahrerlosen Fahrzeugs vollumfänglich übernehmen muss, hat es seine Fahrumgebung grundsätzlich zu erfassen und zu interpretieren. Diese Informationen dienen als Basis zur Bestimmung des Fahrtkurses in räumlicher und zeitlicher Ausprägung.
Zusätzlich sind Prognosen über die Form der Bewegung aller Verkehrsteilnehmer in der Fahrumgebung zu leisten. Grundlage dafür bildet im Wesentlichen die Kenntnis der Eigenschaften und Fähigkeiten der Verkehrsteilnehmer, die dem Fahrzeug zur Verfügung stehen muss.
All diese Aufgaben sind in Echtzeit, auch in komplexen sowie schwierig zu erfassenden und interpretierenden Situationen zu erbringen.48
Zunächst scheint dieser Anforderungskatalog ein System immensen Ausmaßes zu erfordern, jedoch gilt es zu beachten, dass mit zunehmender Größe des Systems auch die durchschnittliche Anzahl an Fehlern proportional steigt. „Der Softwareumfang ist ein wichtiges Indiz für die Fahrzeugsicherheit […]“.49
3.1.2 Sicherheitsanforderungen
Fehler wirken sich im System der Fahrzeugführung aufgrund der zu tragenden Verantwortung gegenüber dem Fahrzeuginsassen und anderen Verkehrsteilnehmern besonders kritisch aus. Der Qualitätssicherung kommt bei der Entwicklung von Systemen zur autonomen Fahrzeugführung also ein hohes Maß an Bedeutung zu.50
Diese kann zum einen durch die Standardisierung von Komponenten oder Entwicklungsschritten gewährleistet werden.
Zum anderen gilt es, neben dem größtmöglichen Ausschluss funktionaler Fehler eine Redundanz- und Integrationsstrategie bei der Entwicklung des Systems zu etablieren. Dies reduziert zusätzlich den Testaufwand vor Systemeinführung und ist von besonderer Bedeutung, da „eine lückenlose Testabdeckung illusorisch ist“.51
Aus der Perspektive der Sicherheit gilt es, „ein lernendes, reflexives System [zu konstruieren], das in der systematischen Beobachtung und Untersuchung von Schadensfällen Systemfehler erkennt, Lernprozesse organisiert und Systemfehler korrigiert“.52
Als gegeben gilt, dass das Fahrzeugführungssystem erst dann eingesetzt werden kann, wenn es seine Aufgabe besser ausführt als der Mensch selbst. Sonst liegt seitens des Nutzers keine Akzeptanz vor und die Fahrzeugführung unterliegt einem zusätzlichen Risiko53, was sich zur Hemmschwelle für die gesamte Technologie des autonomen Fahrens entwickeln kann.
3.2 Zahl der Individualfahrzeuge
Autonome Fahrzeuge zeichnen sich aus Nutzersicht besonders durch die Bequemlichkeit und den Komfort aus.54 Dies steigert die Attraktivität von Individualfahrzeugen, unter anderem durch die Nutzbarmachung der Reisezeit, über das Niveau des heutigen PKW hinaus.55 Eine Erzeugung von Begehrlichkeiten und die Schaffung von zusätzlichen Anreizen zum Erwerb von Fahrzeugen des privaten Gebrauchs ist zu erwarten.
Durch die gesteigerte Attraktivität der Nutzung wird sich die PKW-Verkehrsleistung erhöhen.56 Etwa die Verlagerung von Fahrten des Umweltverbundes auf den motorisierten Straßenverkehr sowie induzierter Verkehr57 können dafür der Grund sein.
Wirken sich die Verlagerungen von Fahrten auf den motorisierten Straßenverkehr stark aus, ist mit einem deutlichen Zuwachs an Fahrzeugen zu rechnen.58 Wohlmöglich über die derzeitige Zahl an Individualfahrzeugen hinausgehend.
Die entstehenden Effekte sind mit den bereits bestehenden Auswirkungen der steigenden Zahl an Individualfahrzeugen vergleichbar und überwiegend ökologisch negativ.
Es gilt somit als Herausforderung, die Zulassung von autonomen Fahrzeugen nach geeigneten Kriterien zu kontrollieren und das uneingeschränkte Wachstum der Zahl an Individualfahrzeugen zu verhindern.
Die Rebound-Effekte des autonomen Fahrens (siehe Kapitel 3.8) werden wesentlich von der Zahl autonomer Fahrzeuge beeinflusst. Zukünftige staatliche Kontrollmechanismen sind deshalb denkbar. Somit ist die Frage, ob mit dem autonomen Fahren die Anzahl privater Fahrzeuge pro Haushalt insgesamt steigen wird, schwer zu beantworten.59
3.3 Hybrid-Verkehr
Die Einführung des Hybrid-Verkehrs ist unvermeidbar, da der Austausch aller konventionellen Fahrzeuge nicht zu einem Zeitpunkt möglich ist. Aufgrund der Lebensdauer von Fahrzeugen wäre dies zudem unwirtschaftlich. Auch wird es weiterhin Automobilnutzer geben, die ihr Fahrzeug gerne selbst fahren möchten.60
Rechtlich ist vor allem die Frage zu klären, wie sich Menschen und herkömmliche Fahrzeuge gegenüber autonomen Fahrzeugen zu verhalten haben und wer Vorrang hat. Möglicherweise haben hier auch technologische Aspekte Einfluss. Die “Schwachstellen” des autonomen Fahrzeugs und Situationen, die besonders anspruchsvoll für das System sind, müssen möglicherweise durch rechtliche Vorschriften des Gesetzgebers ausgeglichen werden.
Die Verkehrssicherheit im Hybrid-Verkehr zu gewährleisten, ist eine Herausforderung. Die Interaktion der gleichermaßen am Straßenverkehr teilnehmenden Menschen und autonomen Fahrzeuge können zu neuen verkehrssicherheitstechnischen Problemen führen, die kompensiert werden müssen, um eine steigende Unfallzahl zu vermeiden.
Ethisch ist zu klären, ob es vertretbar ist, menschliche Verkehrsteilnehmer der Gefahr von autonomen Fahrzeugen auszusetzen, die sie im Extremfall ums Leben bringen können. Ohne eine ethische Grundlage ist kein akzeptierter Hybrid-Verkehr möglich. Aufgrund der beschriebenen Unumgänglichkeit des Hybrid-Verkehrs kann sich dies auch zu einer grundsätzlichen Schicksalsfrage der Technologie von autonomen Fahrzeugen entwickeln und ihre Markteinführung verzögern oder verhindern.
3.4 Infrastruktur
Autonome Fahrzeuge stellen bei der Nutzung von Infrastruktur andere Anforderungen als konventionelle Fahrzeuge, unter anderem aufgrund ihres hohen Kommunikationsbedarfs. Insofern besteht die Herausforderung, das bestehende Straßennetz auf seine Eignung zu überprüfen, um die neu zu errichtende Infrastruktur benennen zu können.
3.4.1 Fähigkeit Straßennetz
Bisher ist das autonome Fahren weder im Bundesverkehrswegeplan noch in den Verkehrsentwicklungsplänen der Länder ein Thema.
Solange die Verkehrswegenetze61 noch nicht vollständig für das autonome Fahren, beispielsweise mit geeigneter Infrastruktur für die Car-2-Infrastructure-Kommunikation ausgerüstet ist, müssen die bestehenden einzelnen Netzabschnitte nach ihrer Fähigkeit für die Nutzung durch autonome Fahrzeuge kategorisiert werden. Dabei gilt es zunächst, die Anforderungen, die autonomes Fahren an die Infrastruktur stellt, vollumfänglich zu definieren.62
Die vorhandenen Straßennetze müssen für autonome Fahrzeuge ertüchtigt werden. Daraus ergeben sich Herausforderungen für die Planung von Verkehrsanlagen, die Netzplanung und Netzgestaltung. Dies gilt in besonderer Weise für die städtischen Straßennetze unter Beachtung der Stadtverträglichkeit. Zusätzliche Herausforderungen für den Städtebau werden resultieren.63
3.4.2 Fahrzeugkommunikation
Da mit fahrerlosen Fahrzeugen keine visuelle Verständigung im bisherigen Umfang möglich ist, haben autonome Fahrzeuge einen hohen Bedarf an Kommunikation. Der Datenaustausch mit dem Fahrzeughersteller, die Car-2-X-Kommunikation zur direkten Umgebung, die Vernetzung mit Verkehrsleitsystemen64 sowie die Car-2-Car-Kommunikation und die Kommunikation mit mobilen Geräten und der Service-Infrastruktur stellen Anforderungen an die Netzinfrastruktur.65,66
Zudem gewinnt die Geschwindigkeit des Datenaustauschs an Bedeutung. Der 5G-Mobilfunkstandard ermöglicht eine Kommunikation in Echtzeit, die unter anderem eine Auslagerung von Berechnungsprozessen des Fahrzeugs ermöglicht.
Eine hohe Datenmenge in Echtzeit wird also zukünftig vom Netzbetreiber zu transportieren sein.67
Ein Ausbau der Kapazitäten der Kommunikationsnetze sowie die Erweiterung der Verfügbarkeit der Netze auf eine flächendeckende Netzabdeckung ist für den Betrieb autonomer Fahrzeuge obligatorisch.
3.5 Sicherheit
Die Sicherheit von autonomen Fahrzeugen zu gewährleisten, gilt als schwerwiegende Herausforderungen, da sie wesentlichen Einfluss auf die Akzeptanz der Technologie hat.
Dabei geht es sowohl um die Sicherheit von Daten (Datenschutz) und Kommunikation des Fahrzeugs als auch um die Sicherheit im Straßenverkehr (Verkehrssicherheit).
3.5.1 Datenschutz: Fahrzeugdaten
Personenbezogene Daten zu erheben, von Fahrtzielen bis hin zu akustischen und visuellen Aufzeichnungen des Fahrzeuginneren68, ist für den Betrieb fahrerloser Fahrzeuge zwangsläufig notwendig, um unter anderem kritische Systemfehler rechtzeitig erkennen zu können und Haftungsfragen in Konfliktfällen zu lösen.
Durch die Einbindung des Fahrzeugs in Echtzeitkommunikationsdatennetze und aufgrund der Masse an Daten, die zwischen dem Fahrzeug und verschiedenen Servern ausgetauscht werden, ist ein Missbrauch nicht vollständig auszuschließen. Es bestehen „Gefahren für die Privatsphäre“.69
Für den Gesetzgeber besteht daher die Herausforderung, die Daten zu schützen. Das Datenschutzrecht ist auf den Verkehrssektor anzupassen beziehungsweise unter Einbeziehung aller besonderen Aspekte des autonomen Fahrens weiterzuentwickeln. Vor allem die Anonymisierung von Nutzerdaten, die Definition von Aufbewahrungs- und Speicherfristen sowie die Festlegung von Einsichts- und Zugriffsrechten sind zu berücksichtigen.70
Die Frage des Eigentums der Daten wird ebenso zu klären sein.
3.5.2 Risikomanagementsystem Verkehrssicherheit
Aufgrund der in Kapitel 2.7 beschriebenen unvorhersehbaren Entwicklung der Sicherheitswirkung von fahrerlosen Fahrzeugen scheint es erforderlich ein Risikomanagementsystem zu etablieren, um mögliche Hemmnisse bei der Entwicklung von autonomen Fahrzeugen, beispielsweise durch Inakzeptanz in der Gesellschaft zu umgehen.
Konkret besteht bei unkontrollierter Einführung unter unakzeptablem Risiko die Gefahr eines Innovationsstopps.71 Der Stör- und Unfallanalyse kommt damit eine große Bedeutung zu.
Neben zuständigen Institutionen ist somit ein Berichtswesen zu etablieren, das bei “Störfällen” herstellerübergreifende Analysen tätigt und die gewonnenen Informationen in transparenter Weise der Öffentlichkeit zur Verfügung stellt.72 Ähnlichkeiten bestehen zu Systemen in der Luftfahrt und Bahntechnik.
3.5.3 Sicherheitskonzept: Betrieb ohne Sicherheitsfahrer im öffentlichen Straßenverkehr
Durchgeführte Pilotprojekte zum autonomen Fahren, beispielsweise der Stadtpilot der Technischen Universität Braunschweig73, weisen einen deutlichen funktionalen Fokus auf. Die funktionale Sicherheit erhält eine untergeordnete Rolle. In derzeitigen Forschungsprojekten zum autonomen Fahren im öffentlichen Straßenverkehr ist deshalb stets ein Sicherheitsfahrer im Fahrzeug anwesend, der das System überwacht und durch aktive Eingriffe das Fahrzeug im Bedarfsfall stoppen kann.74
Eine wesentliche Herausforderung besteht darin autonome Fahrzeuge für den Betrieb ohne Sicherheitsfahrer zu entwickeln.
Ein Sicherheitskonzept ist deshalb zwingend notwendig, dass in der Umsetzung dem autonomen Fahrzeug die Möglichkeit gibt, sich jederzeit und selbstständig in einen sicheren Zustand zu versetzen. Dafür ist eine Metrik zu ermitteln, die das Betriebsrisiko autonomer Fahrzeuge bewerten kann. Darauf aufbauend ist eine zumutbare Schwelle des Risikos, der sichere Zustand, zu definieren.75
Mit dem Betrieb von Fahrzeugen ohne menschliche Insassen wächst auch das Risiko gezielter Manipulation und Sabotage für illegale Aktivitäten und terroristische Angriffe.
Durch die notwendige Konnektivität (siehe Kapitel 3.4.2: Fahrzeugkommunikation) ist ein Isolieren des autonomen Fahrzeugs und damit ein Abschirmen vor Angriffen nicht möglich.76
Ein Sicherheitskonzept für den Betrieb ohne Sicherheitsfahrer hat deshalb auch den weitest gehenden Schutz vor Angriffen auf das System zu gewährleisten. Sofern die Steuerung von Fahrzeugen über den Datenfunk möglich ist, bestehen dadurch zusätzliche Anforderungen an die Security, insbesondere an den Schutz gegen Sabotage.77
3.6 Akzeptanz für technisches System
Verschiedene Untersuchungen zeigen auf, dass bisher keine ausreichende Studie zur Akzeptanz der Gesellschaft oder des individuellen potenziellen Nutzers im Sinne der Marktforschung möglich ist, da der Begriff des autonomen Fahrens in der medialen Darstellung und der öffentlichen Debatte deutliche Unschärfe aufweist. Beispielsweise werden die Begriffe des automatisierten, teilautomatisierten oder fahrerlosen Fahrens synonym verwendet. Eine genauere Abgrenzung ist in der Öffentlichkeit nicht verbreitet. Dies erschwert eine Untersuchung zur Akzeptanz.78
Eine Forschung zur Akzeptanz ist aber eine notwendige Voraussetzung für die Technologie des autonomen Fahrens. Eine Einführung ohne die Akzeptanz der Menschen und ihre Dynamik verstanden zu haben, scheint weitestgehend unmöglich, da die Auswirkungen so weitreichend scheinen.79
Es ist also Aufgabe von politischen und öffentlichen Institutionen, akzeptanz- und zugangsfördernd zu wirken. Beispielsweise durch eine Festsetzung des Begriffs „autonomes Fahren“ in der öffentlichen Debatte, aber auch durch die Initiierung von Pilotprojekten, mithilfe derer das Bild der Öffentlichkeit zum autonomen Fahren geschärft werden kann.80
Dadurch können auch bestehende und entstehende Berührungsängste überwunden werden. Gerade für technikferne Gesellschaftsgruppen, die ohne Internet oder mobiles Endgerät aufgewachsen sind, ist dies von Bedeutung.
3.7 Ökonomie: Neue Marktteilnehmer
„Mit Fahrzeugen, die fahrerlos transportieren, entsteht ein hohes Potenzial für […] starke Marktveränderungen […]“.81
Der Grund dafür ist unter anderem die mit dem autonomen Fahren drastisch veränderte Kostenstruktur von Fahrzeugen. (siehe Kapitel 2.3: Rationalisierung)
Das lockt neue Teilnehmer an den Markt sowohl im Sektor des öffentlichen Verkehrs als auch in der Automobilbranche.
3.7.1 Konkurrenz im öffentlichen Verkehr
Mit der Individualisierung und Flexibilisierung des öffentlichen Verkehrs (siehe Kapitel 2.5.2) lösen sich die Systemgrenzen zwischen ÖPNV, Sharing-Systemen, Nachbarschaftstransporten und Taxisystemen auf.82
Durch die veränderte Kalkulationsbasis sind sowohl Substitutionen dieser Dienste als auch die Entstehung (neuer) mobilitätsorientierter Geschäftsmodelle vermehrt denkbar. Diese Geschäftsmodelle sind auch für Anbieter digitaler Infrastrukturen, Kommunikationsunternehmen, Informationsanbieter, Energieversorgungs- und städtische Einzelhandelsunternehmen über die konventionellen Transportdienstleistungsanbieter hinaus attraktiv und können von diesen angeboten und betrieben werden.83
Der öffentliche Verkehr ist zukünftig einer bisher nicht bestehenden Konkurrenz ausgesetzt, gegen die er sich behaupten muss.
3.7.2 Veränderte Rolle: Automobilhersteller
Die Herstellung von konventionellen Fahrzeugen beinhaltet wesentlich eine konstruktiv-technische Entwicklung (Hardware). Autonome Fahrzeuge dagegen sind überwiegend elektronisch-technisch zu entwickeln (Software).
Zukünftig wird die Software also das wichtigste Unterscheidungsmerkmal eines Fahrzeugs werden.84
Die bisher agierenden Hersteller in der Automobilbranche werden dadurch zunehmend der Konkurrenz aus der Softwarebranche ausgesetzt sein.85 Bei diesen disruptiven Akteuren handelt es sich vor allem um große Unternehmen aus der Informationstechnik-Branche (IT-Branche) mit dem Merkmal des hohen Investitionskapitals (bspw. Google, Apple, etc.).86
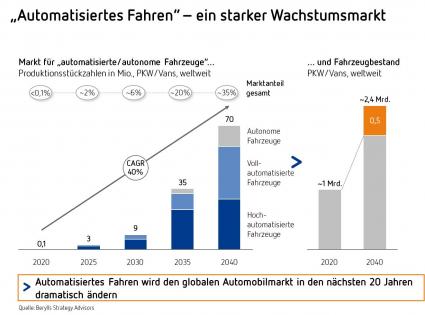
Durch die mit dem autonomen Fahren entstehenden Märkte mit neuen Marktteilnehmern87 entwickelt sich ein attraktives Geschäft (Abbildung 1).
Für die Unternehmen der IT-Branche besteht die Möglichkeit mehr Zeit für ihre Dienste nutzbar zu machen und somit zusätzlichen Gewinn zu generieren. (siehe Kapitel 2.2: Nutzung der gewonnenen Zeit)
Für die bisherigen Akteure des Automobilmarktes besteht die Herausforderung darin, sich am entstehenden Markt mit autonomen Fahrzeugen zu positionieren und gegenüber den disruptiven Akteuren zu bestehen, da die Rolle des klassischen Automobilherstellers an Bedeutung verlieren wird.
Es ist schlussendlich „[…] zu erwarten, dass die gesamte Fahrzeugindustrie in zwanzig bis dreißig Jahren kaum noch wiederzuerkennen sein wird.”88
3.8 Rebound-Effekte
Mit dem autonomen Fahren besteht unter anderem die Möglichkeit der Reduktion des Energieverbrauchs durch den Einsatz alternativer Antriebe (siehe Kapitel 2.4). Auch kann die Technologie eine Rationalisierung hervorrufen (siehe Kapitel 2.3) und kostensparend wirken. Eine Effizienzsteigerung von Fahrzeugen ist mit der autonomen Technologie absehbar. Die Möglichkeit von Rebound-Effekten89 ist damit gegeben.
Durch die gesteigerte Attraktivität der Nutzung von autonomen im Vergleich zu konventionellen Fahrzeugen90, beispielsweise durch die Nutzbarmachung der Reisezeit ist eine steigende Zahl an Individualfahrzeugen nicht auszuschließen.
Somit könnten die Gewinne des autonomen Fahrens, wie beispielsweise die reduzierten Parkflächen und ein verbesserter Verkehrsfluss, durch die steigende Zahl an Fahrzeugen kompensiert werden.91
Wenn zwar umwelteffizientere, dafür aber mehr Fahrzeuge als bisher genutzt werden, kann dies eine eingeschränkte Verbesserung oder sogar Verschlechterung der Umweltauswirkungen von autonomen Fahrzeugen zur Folge haben.
„Möglicherweise hat man hinterher den gleichen Zustand wie vorher, nur mit mehr PKW-Verkehr.“92
Mögliche Rebound-Effekte sind mit der Einführung des autonomen Fahrens zu kontrollieren93 und die Chancen der Technologie damit zu bewahren.
3.9 Regelkonformität autonomer Fahrzeuge
Eine wesentliche Eigenschaft von fahrerlosen Fahrzeugen ist die konsequente Ausführung von programmierten Vorgaben, beispielsweise beim Fahrzeugverhalten im Straßenverkehr. Das Verhalten von autonomen Fahrzeugen im Straßenverkehr, die Regelkonformität, ist somit gänzlich zu definieren.
Es erscheint naheliegend den autonomen Fahrzeugen den gültigen Rechtsstandard für das Verhalten im Straßenverkehr, die in Deutschland gültige Straßenverkehrsordnung, zu implementieren. Diese strengen, regelkonformen autonomen Fahrzeuge nehmen dann eine Vorbildfunktion im Straßenverkehr ein.94
Eine vollständige Durchsetzung der Verkehrsregelungen bei autonomer Fahrzeugführung ist damit möglich. Zum Beispiel kann die Einhaltung von Geschwindigkeitsbeschränkungen und die Eliminierung von „Rot-Fahrten“ an Lichtsignalanlagen garantiert werden.95
Jedoch ergeben sich damit deutliche Abweichungen vom Verhalten menschlicher Fahrer.96 Zudem sind diese ein vollständig regelkonformes Verhalten im Straßenverkehr nicht gewohnt.
Die ausschließliche Implementierung von Rechtsnormen kann somit zu Akzeptanz- und Sicherheitsproblemen führen.97 Zum Beispiel kann sich die regelkonforme Bremsung eines autonomen Fahrzeugs an einem Grün-Pfeil einer Lichtsignalanlage von der Irritation bei menschlichen Fahrzeugführern bis hin zu einer verstärkten Anzahl an Auffahrunfällen auswirken.
Gehäuft werden diese Auffälligkeiten im Hybrid-Verkehr auftreten.
Eine schlichte Abbildung der verschiedenen Fahrverhalten menschlicher Fahrer im Fahrzeugführungssystem, was die Wiedergabe des heutigen Verhaltens im Straßenverkehr durch das autonome Fahrzeug und die Gewohnheit menschlicher Fahrer bedeutet, scheint jedoch aufgrund der Verhaltensdiversität und des damit verbundenen hohen Implementationsaufwands nahezu unmöglich. Noch ist diese Lösung regelkonform und damit rechtlich vertretbar.
Die Herausforderung besteht darin, einen gesellschaftlichen und rechtlichen Konsens zu finden, welcher Grad der Regelkonformität dem autonomen Fahrzeug zu implementieren ist. Es muss „eine konkrete Regelauslegung für Ermessenssituationen erarbeitet werden mit notwendig erscheinenden, situationsabhängigen Erweiterungen der Verhaltensmöglichkeiten, ohne dabei unerwünschte Zustände zu legalisieren.“98
3.10 Haftungs- und Schuldfrage
Nach deutscher Rechtsprechung haftet im Falle, dass durch den Betrieb eines Kraftfahrzeugs „[…] ein Mensch getötet, der Körper oder die Gesundheit eines Menschen verletzt oder eine Sache beschädigt […]“99 worden ist vor allem der Benutzer oder sein Halter.
Jedoch kann der Fahrzeugnutzer beim fahrerlosen Fahren nicht in diesem Maße belangt werden, da er bei der Fahrt im autonomen Fahrzeug vergleichbar beispielsweise mit einem Buspassagier ist.100
Der Gesetzgeber hat die Verschuldensfrage also neu zu definieren.101
Wer haftet im Falle eines Unfalls?
Verschiedene Schadensersatzpflichtige für autonome Fahrzeuge sind denkbar: Der Hersteller, sein Zulieferer, der Staat oder ein eigener Versicherungsfond.102 Naheliegend ist der Halter.103 Bei jedem Haftungsmodell gibt es jeweilige Vor- und Nachteile.
Zweifelsohne ist diese Problemstellung komplex, jedoch eine eindeutige rechtliche Klärung notwendig, da sonst ein Umsetzungshindernis für die Technologie des autonomen Fahrens droht.
„Ohne [.] Verschiebung der Haftung wird der Weg zum autonomen Fahren nicht gangbar sein“.104
3.11 Ethische Fragestellungen
Das ethische Verhalten autonomer Fahrzeuge hat enormen Einfluss auf ihre Akzeptanz in der Gesellschaft. Bereits heute lässt sich dies an den Folgen von Vorfällen mit autonomen Fahrzeugen ableiten: So ziehen die jüngsten Unfälle mit autonomen Uber-Fahrzeugen eine Grundsatzdiskussion über die Technologie des fahrerlosen Fahrens nach sich.
Im Zusammenhang mit dem autonomen Fahren kommen ethische Fragen auf, die bereits Bestandteil der Diskussion zu ethischem Verhalten von Maschinen sind, jedoch auch neue Fragen, wie die Handlung von autonomen Fahrzeugen in sogenannten „Dilemma-Situationen“105 im Straßenverkehr.
3.11.1 Konflikt- und Gefahrensituationen: Vorgaben für einen Algorithmus106
Der Systemalgorithmus autonomer Fahrzeuge benötigt Verhaltensanweisungen, auch in Konflikt- und Gefahrensituationen.
Diese Anweisungen können nicht aus Testfällen oder Pilotprojekten erarbeitet werden, sind sie wesentlich (unterschiedlich) geprägt durch die Gesellschaft und den dort vorherrschenden Standards.
Es besteht die Herausforderung einen gesellschaftlich akzeptierten, ethischen Konsens zu finden, wie sich das autonome Fahrzeug in einer Dilemma-Situation zu verhalten hat, wenn es beispielsweise die Wahl zwischen der Tötung eines Kindes (im Straßenverkehr) oder älteren Menschen (Insasse) hat.
Solche Fragen sind bisher nicht Thema der öffentlichen Diskussion, da der Mensch in Konfliktsituationen vermutlich eigennützig reagiert (sich selbst schützt) beziehungsweise die eingeschränkten menschlichen Fähigkeiten im Vergleich zur Maschine in dieser besonderen Situation keine Entscheidungsfreiheit ermöglichen. Mit der Einführung von autonomen Fahrzeugen mit programmierten Verhaltensanweisungen besteht erstmals die Möglichkeit der Bevorzugung oder Benachteiligung einzelner Verkehrsteilnehmer in Dilemma-Situationen.
Die neu gewonnene Entscheidungsfreiheit und die notwendige Beschreibung des Verhaltens der Maschine im Straßenverkehr erfordert aus technischer Sicht zwangsläufig eine Priorisierung der dynamischen Objekte des Straßenverkehrs (Fußgänger, Radfahrer, andere Fahrzeuge). Die ethische Frage lautet verkürzt: Ist die Kollision mit einem anderen Fahrzeug gegenüber der Kollision mit einem schwächeren Verkehrsteilnehmer, zum Beispiel einem Radfahrer, bevorzugt?
Es gilt ebenso die entwicklungstechnische Herausforderung, die Zahl der Dilemma-Situation möglichst gering zu halten beziehungsweise sie möglichst gänzlich zu vermeiden. Der Umfang der ethisch zu klärenden Fragen kann so reduziert und die daraus entstehenden Barrieren für die Einführung der Technologie können niedriger werden.
3.12 Anforderungen an die Technologie (Zielkriterien)
Die Technologie des autonomen Fahrens bietet enorme bisher nicht bekannte Freiheiten, zum Beispiel der individuellen und kollektiven Erreichbarkeiten. Letztendlich entsteht ein neues Verkehrsmittel.
Die Folgewirkungen der Technologie sind damit weitreichend.
Aus der Vielzahl von Auswirkungen, von der Veränderung der Raumstruktur, der Stadtortwahl von Unternehmen, der Siedlungsentwicklung bis hin zu verstärkten Suburbanisierungsprozessen, sind in einem gesellschaftlichen Diskurs und auf demokratischer Basis gewünschte Effekte (Zielkriterien) des autonomen Fahrens zu wählen.107 Zugleich sind auf diese Weise zu vermeidende Folgewirkungen zu definieren.
Es entstehen Anforderungen an die Technologie und eine Grundlage, auf deren Basis eine verkehrspolitische Beurteilung der Auswirkungen des autonomen Fahrens möglich ist.
Somit „könnten die Potentiale des autonomen Fahrens zum Wohle der Gesellschaft genutzt werden“.108
4 Fazit
Die Vielzahl der Herausforderungen überwiegt die der Chancen und werfen teilweise komplex zu lösende Sachverhalte auf.
Keinesfalls sind sie aber unüberwindbar.
Aus diesem Grund sollten Forschung, die Entwicklung und Feldversuche auf dem Gebiet des autonomen Fahrens fortgesetzt und weiter ausgebaut werden. Erprobungen sind zunächst auf begrenztem Raum und mit überschaubaren Folgen, beispielsweise in Form eines On-Demand-Services auf privatem Gelände, durchzuführen. Mit diesen Anwendungen werden Teilprobleme des autonomen Fahrens gelöst und der Einführung der Technologie kann schrittweise nähergekommen werden.
Der Politik kommt bei der Entwicklung eine Schlüsselrolle zu. Politische Akteure sollten zur Klärung rechtlicher und ethischer Fragen beitragen und mit ihrer Artikulationsfunktion die Technologie des autonomen Fahrens stärker in den Fokus der öffentlichen Aufmerksamkeit bringen.
In der Gesellschaft ist ein Verständnis für den Begriff des autonomen Fahrens zu etablieren, um in einem anerkannten Rahmen eine Fortentwicklung der Technologie zu ermöglichen.
Nur auf diese Weise können die Herausforderungen überwunden und die Chancen genutzt werden.
Anmerkungen und Quellen
- „(…) Parkvorgänge (werden) vollautomatisch durch das Fahrzeug ausgeführt (.). Zur Übergabe stellt der Fahrer das Fahrzeug (…) ab und aktiviert die Funktion (z. B. via Smartphone). Sobald er seine Fahrt fortsetzen möchte, fordert er sein Fahrzeug zurück und übernimmt es (…).“ – VERBAND DER AUTOMOBILINDUSTRIE, 2015. Automatisierung (online). Von Fahrerassistenzsystemen zum automatisierten Fahren. Berlin: Verband der Automobilindustrie (Zugriff am: 24.05.2018). Verfügbar unter: https://www.vda.de/dam/vda/publications/2015/automatisierung.pdf ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 19 ↩
- BECKMANN, K. und G. SAMMER, 2016. Autonomes Fahren im Stadt-und Regionalverkehr (online). Memorandum für eine nachhaltige Mobilitätsentwicklung aus der integrierten Sicht der Verkehrswissenschaft. Müllheim an der Ruhr: K. Kalwitzki, 25.10.2016 (Zugriff am: 22.04.2018). Verfügbar unter: http://www.verkehrszeichen-online.de/Memorandum_Autonomes-Fahren.pdf, S. 5 ↩
- SIVAK, M. und B. SCHOETTLE, 2015. ROAD SAFETY WITH SELF-DRIVING VEHICLES: GENERAL LIMITATIONS AND ROAD SHARING WITH CONVENTIONAL VEHICLES. Michigan: The University of Michigan, S. 1 ↩
- BECKMANN, K. und G. SAMMER, 2016. Autonomes Fahren im Stadt-und Regionalverkehr (online). Memorandum für eine nachhaltige Mobilitätsentwicklung aus der integrierten Sicht der Verkehrswissenschaft. Mülheim an der Ruhr: K. Kalwitzki, 25.10.2016 (Zugriff am: 22.04.2018). Verfügbar unter: http://www.verkehrszeichen-online.de/Memorandum_Autonomes-Fahren.pdf, S. 4 ↩
- MCKINSEY&COMPANY, 2015. McKinsey-Studie: Autonomes Fahren verändert Autoindustrie und Städte (online). Düsseldorf: McKinsey&Company, 03.03.2015 (Zugriff am: 28.04.2018). Verfügbar unter: https://www.mckinsey.de/2015-03-04/autonomes-fahren-veraendert-autoindustrie-und-staedte ↩
- BERTONCELLO, M. und Dominik WEE, 2015. Ten ways autonomous driving could redefine the automotive world (online) New York: McKinsey & Company (Zugriff am: 15.05.2018). Verfügbar unter: https://www.mckinsey.com/industries/automotive-and-assembly/our-insights/ten-ways-autonomous-driving-could-redefine-the-automotive-world ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 19 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 19 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 19 ↩
- WINNER, H. und W. WACHENFELD, 2015. Auswirkungen des autonomen Fahrens auf das Fahrzeugkonzept. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 264-285, ISBN 978-3-662-45853-2, S. 282f ↩
- BECKMANN, K. und G. SAMMER, 2016. Autonomes Fahren im Stadt-und Regionalverkehr (online). Memorandum für eine nachhaltige Mobilitätsentwicklung aus der integrierten Sicht der Verkehrswissenschaft. Müllheim an der Ruhr: K. Kalwitzki, 25.10.2016 (Zugriff am: 22.04.2018). Verfügbar unter: http://www.verkehrszeichen-online.de/Memorandum_Autonomes-Fahren.pdf, S. 8 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 20 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 28 ↩
- WINNER, H. und W. WACHENFELD, 2015. Auswirkungen des autonomen Fahrens auf das Fahrzeugkonzept. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 264-285, ISBN 978-3-662-45853-2, S. 283 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 28 ↩
- SIVAK, M. und B. SCHOETTLE, 2015. ROAD SAFETY WITH SELF-DRIVING VEHICLES: GENERAL LIMITATIONS AND ROAD SHARING WITH CONVENTIONAL VEHICLES. Michigan: The University of Michigan, S. 1 ↩
- BECKMANN, K. und G. SAMMER, 2016. Autonomes Fahren im Stadt-und Regionalverkehr (online). Memorandum für eine nachhaltige Mobilitätsentwicklung aus der integrierten Sicht der Verkehrswissenschaft. Mülheim an der Ruhr: K. Kalwitzki, 25.10.2016 (Zugriff am: 22.04.2018). Verfügbar unter: http://www.verkehrszeichen-online.de/Memorandum_Autonomes-Fahren.pdf, S. 5 ↩
- BECKMANN, K. und G. SAMMER, 2016. Autonomes Fahren im Stadt-und Regionalverkehr (online). Memorandum für eine nachhaltige Mobilitätsentwicklung aus der integrierten Sicht der Verkehrswissenschaft. Mülheim an der Ruhr: K. Kalwitzki, 25.10.2016 (Zugriff am: 22.04.2018). Verfügbar unter: http://www.verkehrszeichen-online.de/Memorandum_Autonomes-Fahren.pdf, S. 5 ↩
- LENZ, B. und E. FRAEDRICH, 2015. Neue Mobilitätskonzepte und autonomes Fahren: Potenziale der Veränderung. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 174-195, ISBN 978-3-662-45853-2, S. 185 ↩
- LENZ, B. und E. FRAEDRICH, 2015. Neue Mobilitätskonzepte und autonomes Fahren: Potenziale der Veränderung. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 174-195, ISBN 978-3-662-45853-2, S. 185 ↩
- LENZ, B. und E. FRAEDRICH, 2015. Neue Mobilitätskonzepte und autonomes Fahren: Potenziale der Veränderung. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 174-195, ISBN 978-3-662-45853-2, S. 185f. ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 20 ↩
- LENZ, B. und E. FRAEDRICH, 2015. Neue Mobilitätskonzepte und autonomes Fahren: Potenziale der Veränderung. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 174-195, ISBN 978-3-662-45853-2, S. 189 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 20 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 20 ↩
- BECKMANN, K. und G. SAMMER, 2016. Autonomes Fahren im Stadt-und Regionalverkehr (online). Memorandum für eine nachhaltige Mobilitätsentwicklung aus der integrierten Sicht der Verkehrswissenschaft. Mülheim an der Ruhr: K. Kalwitzki, 25.10.2016 (Zugriff am: 22.04.2018). Verfügbar unter: http://www.verkehrszeichen-online.de/Memorandum_Autonomes-Fahren.pdf, S. 5 ↩
- BECKMANN, K. und G. SAMMER, 2016. Autonomes Fahren im Stadt-und Regionalverkehr (online). Memorandum für eine nachhaltige Mobilitätsentwicklung aus der integrierten Sicht der Verkehrswissenschaft. Mülheim an der Ruhr: K. Kalwitzki, 25.10.2016 (Zugriff am: 22.04.2018). Verfügbar unter: http://www.verkehrszeichen-online.de/Memorandum_Autonomes-Fahren.pdf, S. 5 ↩
- Die Effizienz eines Verkehrssystems ist wesentlich abhängig von der Kapazität seiner Verkehrsanlagen. Maßgebend für die Kapazitäten sind innerorts überwiegend die Knotenpunkte mit Lichtsignalanlagen, auf Autobahnen die Kapazitäten auf freier Strecke. ↩
- FRIEDRICH, B., 2015. Verkehrliche Wirkungen autonomer Fahrzeuge. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 331-350, ISBN 978-3-662-45853-2, S. 339ff. ↩
- BECKMANN, K. und G. SAMMER, 2016. Autonomes Fahren im Stadt-und Regionalverkehr (online). Memorandum für eine nachhaltige Mobilitätsentwicklung aus der integrierten Sicht der Verkehrswissenschaft. Mülheim an der Ruhr: K. Kalwitzki, 25.10.2016 (Zugriff am: 22.04.2018). Verfügbar unter: http://www.verkehrszeichen-online.de/Memorandum_Autonomes-Fahren.pdf, S. 4 ↩
- Gemischter Verkehr, der sich sowohl aus autonomen Fahrzeugen als auch aus konventionellen Fahrzeugen mit menschlichem Fahrer zusammensetzt, die miteinander interagieren. ↩
- FRIEDRICH, B., 2015. Verkehrliche Wirkungen autonomer Fahrzeuge. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 331-350, ISBN 978-3-662-45853-2, S. 339ff. ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 22 ↩
- FRIEDRICH, B., 2015. Verkehrliche Wirkungen autonomer Fahrzeuge. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 331-350, ISBN 978-3-662-45853-2, S. 339ff. ↩
- FRIEDRICH, B., 2015. Verkehrliche Wirkungen autonomer Fahrzeuge. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 331-350, ISBN 978-3-662-45853-2, S. 346 ↩
- BECKMANN, K. und G. SAMMER, 2016. Autonomes Fahren im Stadt-und Regionalverkehr (online). Memorandum für eine nachhaltige Mobilitätsentwicklung aus der integrierten Sicht der Verkehrswissenschaft. Mülheim an der Ruhr: K. Kalwitzki, 25.10.2016 (Zugriff am: 22.04.2018). Verfügbar unter: http://www.verkehrszeichen-online.de/Memorandum_Autonomes-Fahren.pdf, S. 4f. ↩
- BERTONCELLO, M. und Dominik WEE, 2015. Ten ways autonomous driving could redefine the automotive world (online) New York: McKinsey & Company (Zugriff am: 15.05.2018). Verfügbar unter: https://www.mckinsey.com/industries/automotive-and-assembly/our-insights/ten-ways-autonomous-driving-could-redefine-the-automotive-world ↩
- STATISTISCHES BUNDESAMT. 2016. Unfallentwicklung auf deutschen Straßen 2015, 12.07.2016 (Zugriff am: 03.06.2018). Verfügbar unter: https://www.destatis.de/DE/PresseService/Presse/Pressekonferenzen/2016/Unfallentwicklung_2015/Pressebroschuere_unfallentwicklung.pdf?__blob=publicationFile, S. 11 ↩
- BECKMANN, K. und G. SAMMER, 2016. Autonomes Fahren im Stadt-und Regionalverkehr (online). Memorandum für eine nachhaltige Mobilitätsentwicklung aus der integrierten Sicht der Verkehrswissenschaft. Mülheim an der Ruhr: K. Kalwitzki, 25.10.2016 (Zugriff am: 22.04.2018). Verfügbar unter: http://www.verkehrszeichen-online.de/Memorandum_Autonomes-Fahren.pdf, S. 4 ↩
- SIVAK, M. und B. SCHOETTLE, 2015. ROAD SAFETY WITH SELF-DRIVING VEHICLES: GENERAL LIMITATIONS AND ROAD SHARING WITH CONVENTIONAL VEHICLES. Michigan: The University of Michigan, S. 1 (übersetzt) ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 33 ↩
- WINKLE, T., 2015. Sicherheitspotenzial automatisierter Fahrzeuge: Erkenntnisse aus der Unfallforschung. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 351-376, ISBN 978-3-662-45853-2, S. 373 ↩
- WINKLE, T., 2015. Sicherheitspotenzial automatisierter Fahrzeuge: Erkenntnisse aus der Unfallforschung. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 351-376, ISBN 978-3-662-45853-2, S. 372ff. ↩
- WINKLE, T., 2015. Sicherheitspotenzial automatisierter Fahrzeuge: Erkenntnisse aus der Unfallforschung. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 351-376, ISBN 978-3-662-45853-2, S. 373 ↩
- SIVAK, M. und B. SCHOETTLE, 2015. ROAD SAFETY WITH SELF-DRIVING VEHICLES: GENERAL LIMITATIONS AND ROAD SHARING WITH CONVENTIONAL VEHICLES. Michigan: The University of Michigan, S. 7 (übersetzt) ↩
- WINKLE, T., 2015. Sicherheitspotenzial automatisierter Fahrzeuge: Erkenntnisse aus der Unfallforschung. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 351-376, ISBN 978-3-662-45853-2, S. 372ff. ↩
- ERSOY, M. und S. GIES, 2017. Fahrwerkhandbuch: Grundlagen · Fahrdynamik · Fahrverhalten · Komponenten · Elektronische Systeme · Fahrerassistenz · Autonomes Fahren · Perspektiven. 5. Auflage. Wiesbaden: Springer Vieweg. ISBN 978-3-658-15467-7, S. 964f. ↩
- JOHANNING, V. und R. MILDNER, 2015. Car IT kompakt: Das Auto der Zukunft – Vernetzt und autonom fahren. 1. Auflage. Wiesbaden: Springer Vieweg. ISBN 978-3-658-09967-1, S. 78 ↩
- JOHANNING, V. und R. MILDNER, 2015. Car IT kompakt: Das Auto der Zukunft – Vernetzt und autonom fahren. 1. Auflage. Wiesbaden: Springer Vieweg. ISBN 978-3-658-09967-1, S. 77 ↩
- JOHANNING, V. und R. MILDNER, 2015. Car IT kompakt: Das Auto der Zukunft – Vernetzt und autonom fahren. 1. Auflage. Wiesbaden: Springer Vieweg. ISBN 978-3-658-09967-1, S. 72 ↩
- vgl. KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 17 ↩
- ERSOY, M. und S. GIES, 2017. Fahrwerkhandbuch: Grundlagen · Fahrdynamik · Fahrverhalten · Komponenten · Elektronische Systeme · Fahrerassistenz · Autonomes Fahren · Perspektiven. 5. Auflage. Wiesbaden: Springer Vieweg. ISBN 978-3-658-15467-7, S. 964f. ↩
- REINKING, G., 2015. INTELLIGENT, NACHHALTIG, AUTONOM (online). 11.09.2015 (Zugriff am: 15.05.2018). Verfügbar unter: http://mobilitaetvonmorgen.de/vernetzte-mobilitaet/# ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 23 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 23 ↩
- BECKMANN, K. und G. SAMMER, 2016. Autonomes Fahren im Stadt-und Regionalverkehr (online). Memorandum für eine nachhaltige Mobilitätsentwicklung aus der integrierten Sicht der Verkehrswissenschaft. Mülheim an der Ruhr: K. Kalwitzki, 25.10.2016 (Zugriff am: 22.04.2018). Verfügbar unter: http://www.verkehrszeichen-online.de/Memorandum_Autonomes-Fahren.pdf, S. 4 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 24 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 20 ↩
- SIVAK, M. und B. SCHOETTLE, 2015. ROAD SAFETY WITH SELF-DRIVING VEHICLES: GENERAL LIMITATIONS AND ROAD SHARING WITH CONVENTIONAL VEHICLES. Michigan: The University of Michigan, S. 5 ↩
- „(…) in den deutschen Regelwerken entsprechend ihrer Funktionalität in Straßenfunktionsklassen unterteilt (Autobahnen, Landstraßen, städtische Verbindungsstraßen, Erschließungsstraßen)“ (KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 26) ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 27 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 27 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 17 ↩
- JOHANNING, V. und R. MILDNER, 2015. Car IT kompakt: Das Auto der Zukunft – Vernetzt und autonom fahren. 1. Auflage. Wiesbaden: Springer Vieweg. ISBN 978-3-658-09967-1, S. 66f. ↩
- Einen Überblick zu den Funktionen und der Notwendigkeit von Car-2-Car- und Car-2-Infrastructure-Kommunikation für das autonome Fahren geben V. Johanning und R. Mildner, 2015. In: Car IT kompakt: Das Auto der Zukunft – Vernetzt und autonom fahren, S. 66f. ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 17 ↩
- JOHANNING, V. und R. MILDNER, 2015. Car IT kompakt: Das Auto der Zukunft – Vernetzt und autonom fahren. 1. Auflage. Wiesbaden: Springer Vieweg. ISBN 978-3-658-09967-1, S. 108 ↩
- JOHANNING, V. und R. MILDNER, 2015. Car IT kompakt: Das Auto der Zukunft – Vernetzt und autonom fahren. 1. Auflage. Wiesbaden: Springer Vieweg. ISBN 978-3-658-09967-1, S.108 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 31f. ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 33 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 33 ↩
- Nothdurft, T., Hecker, P., Ohl, S., Saust, F., Maurer, M., Reschka, A., Böhmer, J. R. (2011). Stadtpilot: First fully autonomous test drives in urban traffic. 2011 IEEE International Annual Conference on Intelligent Transportation Systems (ITSC), S 919–924. Washington DC, USA; Wille, J. M., Saust, F., Maurer, M. (2010). Stadtpilot: Driving autonomously on Braunschweig’s inner ring road. 2010 IEEE Intelligent Vehicles Symposium (IV), S 506–511. San Diego, CA, USA ↩
- RESCHKA, A., 2015. Sicherheitskonzept für autonome Fahrzeuge. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 489-513, ISBN 978-3-662-45853-2, S. 510 ↩
- RESCHKA, A., 2015. Sicherheitskonzept für autonome Fahrzeuge. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 489-513, ISBN 978-3-662-45853-2, S. 509f. ↩
- JOHANNING, V. und R. MILDNER, 2015. Car IT kompakt: Das Auto der Zukunft – Vernetzt und autonom fahren. 1. Auflage. Wiesbaden: Springer Vieweg. ISBN 978-3-658-09967-1, S. 91 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 17 ↩
- FRAEDRICH, E. und B. LENZ, 2015. Gesellschaftliche und individuelle Akzeptanz des autonomen Fahrens. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 638-660, ISBN 978-3-662-45853-2, S. 640ff. ↩
- FRAEDRICH, E. und B. LENZ, 2015. Gesellschaftliche und individuelle Akzeptanz des autonomen Fahrens. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 638-660, ISBN 978-3-662-45853-2, S. 640 ↩
- FRAEDRICH, E. und B. LENZ, 2015. Gesellschaftliche und individuelle Akzeptanz des autonomen Fahrens. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 638-660, ISBN 978-3-662-45853-2, S. 657 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 17, S. 19 ↩
- BECKMANN, K. und G. SAMMER, 2016. Autonomes Fahren im Stadt-und Regionalverkehr (online). Memorandum für eine nachhaltige Mobilitätsentwicklung aus der integrierten Sicht der Verkehrswissenschaft. Mülheim an der Ruhr: K. Kalwitzki, 25.10.2016 (Zugriff am: 22.04.2018). Verfügbar unter: http://www.verkehrszeichen-online.de/Memorandum_Autonomes-Fahren.pdf, S. 5 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 20 ↩
- ERSOY, M. und S. GIES, 2017. Fahrwerkhandbuch: Grundlagen · Fahrdynamik · Fahrverhalten · Komponenten · Elektronische Systeme · Fahrerassistenz · Autonomes Fahren · Perspektiven. 5. Auflage. Wiesbaden: Springer Vieweg. ISBN 978-3-658-15467-7, S.967 ↩
- JOHANNING, V. und R. MILDNER, 2015. Car IT kompakt: Das Auto der Zukunft – Vernetzt und autonom fahren. 1. Auflage. Wiesbaden: Springer Vieweg. ISBN 978-3-658-09967-1, S.100f. ↩
- JOHANNING, V. und R. MILDNER, 2015. Car IT kompakt: Das Auto der Zukunft – Vernetzt und autonom fahren. 1. Auflage. Wiesbaden: Springer Vieweg. ISBN 978-3-658-09967-1, S.101 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 21 ↩
- JOHANNING, V. und R. MILDNER, 2015. Car IT kompakt: Das Auto der Zukunft – Vernetzt und autonom fahren. 1. Auflage. Wiesbaden: Springer Vieweg. ISBN 978-3-658-09967-1, S. 105 ↩
- „Effizienzsteigerungen senken (.) die Kosten für Produkte oder Dienstleistungen. Dies kann dazu führen, dass sich das Verhalten der Nutzerinnen und Nutzer ändert: Sie verbrauchen mehr – die ursprünglichen Einsparungen werden teilweise wieder aufgehoben. Dieser Effekt wird Rebound genannt.“ – UMWELTBUNDESAMT. 2014. Rebound-Effekte (online). Dessau-Roßlau: Umweltbundesamt, 14.03.2014 (Zugriff am: 07.06.2018). Verfügbar unter: https://www.umweltbundesamt.de/themen/abfall-ressourcen/oekonomische-rechtliche-aspekte-der/rebound-effekte ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 23 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-22197, S. 24 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 23 ↩
- Etwa könnte der Gesetzgeber die Zulassung von autonomen Fahrzeugen an ein bestimmtes Kriterium, zum Beispiel an die Umweltverträglichkeit, binden oder die Behörden könnten städtische Verkehrsinfrastruktur stärker bewirtschaften. ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 12 ↩
- BECKMANN, K. und G. SAMMER, 2016. Autonomes Fahren im Stadt-und Regionalverkehr (online). Memorandum für eine nachhaltige Mobilitätsentwicklung aus der integrierten Sicht der Verkehrswissenschaft. Mülheim an der Ruhr: K. Kalwitzki, 25.10.2016 (Zugriff am: 22.04.2018). Verfügbar unter: http://www.verkehrszeichen-online.de/Memorandum_Autonomes-Fahren.pdf, S. 4 ↩
- Das Verhalten menschlicher Fahrer im Straßenverkehr folgt, zum Beispiel bei der Wahl der Fahrtgeschwindigkeit, keinen technischen Voraussetzungen oder der Geschwindigkeitsbegrenzung, „sondern (wird) viel unmittelbarer (und weniger bewusst) u.a. durch die Fahrbahnbreite, die Fahroberfläche und die Sichtweite“ beeinflusst. – SCHLAG, B., 2016. Automatisiertes Fahren im Straßenverkehr – Offene Fragen aus Sicht der Psychologie. In: Zeitschrift für Verkehrssicherheit. (2), S. 94-98. ISSN 0044-3654, S. 95 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 12 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 13 ↩
- STRASSENVERKEHRSGESETZ vom 05. März 2003 (BGBl. I S. 310, ber. S. 919), das zuletzt aufgrund des Gesetztes vom 30. Juni 2017 (BGBl. I S. 2162) geändert worden ist ↩
- JOHANNING, V. und R. MILDNER, 2015. Car IT kompakt: Das Auto der Zukunft – Vernetzt und autonom fahren. 1. Auflage. Wiesbaden: Springer Vieweg. ISBN 978-3-658-09967-1, S. 73 ↩
- BECKMANN, K. und G. SAMMER, 2016. Autonomes Fahren im Stadt-und Regionalverkehr (online). Memorandum für eine nachhaltige Mobilitätsentwicklung aus der integrierten Sicht der Verkehrswissenschaft. Mülheim an der Ruhr: K. Kalwitzki, 25.10.2016 (Zugriff am: 22.04.2018). Verfügbar unter: http://www.verkehrszeichen-online.de/Memorandum_Autonomes-Fahren.pdf, S. 7 ↩
- JOHANNING, V. und R. MILDNER, 2015. Car IT kompakt: Das Auto der Zukunft – Vernetzt und autonom fahren. 1. Auflage. Wiesbaden: Springer Vieweg. ISBN 978-3-658-09967-1, S. 73 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 16 ↩
- KNIEPS, G. und andere, 2017. Automatisiertes Fahren im Straßenverkehr: Herausforderungen für die zukünftige Verkehrspolitik, Gutachten des Wissenschaftlichen Beirats beim Bundesminister für Verkehr und digitale Infrastruktur. In: Zeitschrift für Straßenverkehrstechnik. (8 und 9). ISSN 0039-2219, S. 16 ↩
- Eine „Zwangslage, (.) in der sich jemand befindet, besonders wenn er zwischen zwei in gleicher Weise schwierigen oder unangenehmen Dingen wählen soll oder muss.“ (Duden) Im Zusammenhang mit dem autonomen Fahren sind das Situationen im Straßenverkehr, „in denen eine Abwägung getroffen werden muss, welches Verhalten im Falle einer unvermeidbaren Kollision den beteiligten Personen innerhalb und außerhalb des Fahrzeugs den geringsten Schaden zufügt“ – MINX, E. und R. DIETRICH, 2015. Geleitwort. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 3-7, ISBN 978-3-662-45853-2, S. 6 ↩
- GERDES, C. und S. THORNTON, 2015. Implementable Ethics for Autonomous Vehicles. In: Markus MAURER und andere, Hrsg. Autonomes Fahren: Technische, rechtliche und gesellschaftliche Aspekte. 1. Auflage. Berlin: Springer-Verlag, S. 86-102, ISBN 978-3-662-45853-2, S. 88ff. ↩
- BECKMANN, K. und G. SAMMER, 2016. Autonomes Fahren im Stadt-und Regionalverkehr (online). Memorandum für eine nachhaltige Mobilitätsentwicklung aus der integrierten Sicht der Verkehrswissenschaft. Mülheim an der Ruhr: K. Kalwitzki, 25.10.2016 (Zugriff am: 22.04.2018). Verfügbar unter: http://www.verkehrszeichen-online.de/Memorandum_Autonomes-Fahren.pdf, S. 8 ↩
- BECKMANN, K. und G. SAMMER, 2016. Autonomes Fahren im Stadt-und Regionalverkehr (online). Memorandum für eine nachhaltige Mobilitätsentwicklung aus der integrierten Sicht der Verkehrswissenschaft. Mülheim an der Ruhr: K. Kalwitzki, 25.10.2016 (Zugriff am: 22.04.2018). Verfügbar unter: http://www.verkehrszeichen-online.de/Memorandum_Autonomes-Fahren.pdf, S. 9 ↩









Jetzt kann man nicht sagen, dass dies eine ferne Zukunft ist. Natürlich, arbeiten sie schon lange am autonomen Fahren, aber sie haben bereits ihren eigenen Erfolg. Es gibt aber auch die Nachteile: das Thema “Sicherheit”. Obwohl sie sagen, dass solche Autos besser fahren als Menschen (Meinung https://blog.andersenlab.com/de/can-self-driving-cars-drive-better-than-we-do), gab es bereits einen Vorfall. Dies ist zum einen und zum anderen gibt es noch keine Entscheidung über die Anpassung an jede Region. Sie sehen, jeder hat seinen eigenen Fahrstil. Ich finde, dass dies nicht ein großes Problem ist, da es im Laufe der Zeit gelöst werden kann. Das eigentliche Problem – ist die Skepsis der Menschen. Manchmal ist dies nur Skepsis, und manchmal sagen nicht-Technik Menchen über Hackers und Terroristen. Wie gehen wir damit um?
Danke für diesen Artikel! Ich schließe mich meinem Vorredner an, dahingehend, dass es ohne eine wirksame Regulierung des irgendwann (ab 2035 vermutlich frühestens) komplett fahrerlosen Fahrens (Stufe 5) im MIV zu unerwünschten Reboundeffekten kommen wird. Diesen Effekt haben wir (das Fraunhofer ISI) übrigens in einer Studie (“Energie- und THG-Wirkungen des automatisierten und vernetzten Fahrens im Straßenverkehr” – Link: https://www.isi.fraunhofer.de/de/presse/2019/presseinfo-06-2019-umweltwirkungen-automatisiertes-fahren.html) zu den Wirkungen der Automatisierung abgeschätzt. Es entsteht durch geringere Kosten und die Möglichkeit der Ausübung fahrfremder Tätigkeiten ein Reboundeffekt. Diesen gilt es einzugrenzen, z.B. durch Bepreisung von Leerfahrten, etc. In der Studie ist übrigens auch herausgekommen, dass es vermutlich auf Grund auch zukünftig sehr hoher Kosten für die Ausstattung der Fahrzeuge mit Stufe 5 Technik bis 2050 nur ein kleiner Teil der Pkw Flotten fahrerlos sein werden. Man wird es daher immer noch mit “Mischverkehr” aus menschlich gesteuerten, assistierten, teil-, hoch- um vollautomatisierten und fahrerlosen Fahrzeugen zu tun haben. Und dann sind leider die Effekte auf die Erhöhung der Kapazität und der Reisezeit auch nicht gegeben. Die TU München hat hierzu eine Studie durchgeführt. Im Mischverkehr sinkt die Kapazität sogar noch leicht bis ein Großteil der Fahrzeuge vollautomatisiert bzw. fahrerlos unterwegs sein wird. Übrigens kann die 80%ige Erhöhung der Kapazität nur auf Autobahnen erreicht werden und nur dann, wenn die Höchstgeschwindigkeit auf Tempo 80 reduziert wird und der Sicherheitsabstand verdoppelt wird. Und das sind nun mal nicht wirklich realistische Annahmen.
Ich meine, der Artikel geht viel zu wenig auf Rebound-Effekte ein.
Z.B. ein Großteil der Schüler dürfen zur Zeit mangels Führerschein keine KFZ benutzen. Wenn nun diese Schüler zum einem großen Teil aus Bequemlichkeitsgründen auf autonome KFZ umsteigen wird die die Zahl der benötigten KFZ erheblich steigen. Oder eine Fahrt eines “Mama-Taxis” wird dann durch mindestens zwei Fahrten eines autonomen KFZ ersetzt.
Fahrten zu einem Parkplatz außerhalb des Stadtzentrums stellen in der Regel eine nutzlose Leerfahrten dar. Und diese Parkflächen müssen auch erst gebaut werden.
Welche Auswirkungen hat eine durch autonome Fahrzeuge optimal benutzte Fahrbahn auf nicht motorisierten IV ? Z.B. wenn diese Fahrbahn gequert werden muss ?
Oder noch weiter gedacht: Viele Volkskrankheiten werden durch Bewegungsmangel verursacht. Es ist unwahrscheinlich, das autonome Fahrzeuge zu mehr Bewegung ihrer Insassen führen…