




Zusammenfassung
Dieser Artikel führt in das Thema “Automatisierung des Straßengüterfernverkehrs” ein. Nach einer Betrachtung der Wirkung selbstfahrender Lkw hinsichtlich Effizienz / Wirtschaftlichkeit, Vernetzung, ökologischer Verträglichkeit und Verkehrssicherheit wird näher auf mögliche Auswirkungen auf dem Arbeitsmarkt eingegangen. Hierfür wird insbesondere Bezug auf eine Studie von OECD/ITF, ACEA, ITF und IRU genommen, welche verschiedene Adaptionsszenarien und die daraus folgenden Wirkungen auf den Bedarf an Berufskraftfahrern beleuchtet. Sie schließt mit mehreren Empfehlungen an die Politik. Dieser Artikel beschäftigt sich des Weiteren mit der Kostenstruktur und möglichen Adaptionsszenarien selbstfahrender Lkw und schließt mit einer Übersicht über mehrere automatisierte Nutzfahrzeuge bzw. Nutzfahrzeugkonzepte, welche sich in der Erprobung oder bereits im Echtbetrieb befinden.
Inhaltsverzeichnis
- Verkehrssicherheit
- Automatisierungsstufen
- Höhere Wirtschaftlichkeit und Wirkung auf die Arbeitsplätze
- Beschäftigungswirkung
- Adaption und Kosten
- Automatisierte Nutzfahrzeuge – eine Übersicht
- Quellen
Die Digitalisierung und voranschreitende Automatisierung im Fahrzeugbereich wird häufig vorrangig mit Bezug auf den Personenverkehr diskutiert. Eine für den Erfolg des automatisierten Fahrens maßgebliche Frage ist hierbei die Marktakzeptanz. Die Debatte wird – obwohl noch ganz am Anfang – hochemotionalisiert geführt, unter anderem ist bereits von der “Entmannung des deutschen Autofahrers” die Rede.
Der Straßengüterverkehr wird in der gegenwärtigen Diskussion oftmals außen vor gelassen, wobei sich in diesem Bereich weitaus schneller größere Potenziale und Veränderungen ergeben könnten. Die Markteinführung könnte rascher und umfassender erfolgen, da die Marktakzeptanz aufgrund der größeren Entscheidungsrationalität höher ist. Die Transportbranche ist mit einer hohen Kostensensitivität ausgestattet und sich der größer werdenden Problematik des Fahrermangels bewusst.
Neben einer höheren (wirtschaftlichen) Effizienz können zudem positive Wirkungen in den Bereichen Verkehrssicherheit, Umweltverträglichkeit des Verkehrs sowie Transportqualität aufgrund besserer Vernetzung und Verfügbarkeit von (Echtzeit-)Zustandsdaten der Fracht erzielt werden.
Verkehrssicherheit
In der Europäischen Union sterben jährlich rund 26.000 Menschen im Straßenverkehr. Über 90 % aller tödlichen Verkehrsunfälle sollen den menschlichen Fehler als Ursache haben. Rein rechnerisch kommen auf jeden Verkehrstoten zudem vier verletzte Personen mit langfristigen körperlichen Einschränkungen.
Bei Unfällen mit Lkw-Beteiligung (über 7,5 Tonnen) lag der menschliche Fehler mit 85,2 Prozent im Rahmen einer EU-Untersuchung (n = 624) leicht unter dem Gesamtdurchschnitt. Zudem waren Lkw-Fahrer nur in 25 % der Unfälle der Unfallverursacher. Jedoch gehen Unfälle mit Beteiligung eines schweren Lkw weitaus häufiger tödlich aus.
Bei Lkw-Unfällen mit Getöteten steht überhöhte Geschwindigkeit an erster Stelle der Unfallursachen. Von 798 Lkw-Unfällen mit mindestens einem Getöteten wurde bei annähernd jedem vierten Unfall (24 %) nicht angepasste Geschwindigkeit als Unfallursache angegeben. Mangelnde Verkehrstüchtigkeit des Fahrers (aufgrund des Einflusses von Alkohol oder Drogen, Übermüdung, körperlicher oder geistiger Mängel) wurde in 7 % der Fälle berichtet. Ungenügender Sicherheitsabstand war in 6,6 % der Fälle Unfallursache. Hinsichtlich der Verkehrstüchtigkeit der Lkw-Fahrer spielen insbesondere Alkohol und Übermüdung bei Unfällen im Außerortsbereich eine wichtige Rolle.1
Um die Verkehrssicherheit zu erhöhen, müssen gemäß EU-Verordnung (EG) Nr. 661/2009 ab dem Jahr 2015 neu zugelassene Lkw und Busse mit einem Spurhalteassistenten mit Spurverlassenswarnung und ab 2018 mit einem Advanced Emergency Braking System (AEBS – System Automatische Notbremse) ausgestattet sein. AEBS nutzt Sensoren, um den Abstand zum vorderen Fahrzeug zu überwachen und Situationen zu erkennen, in denen die relative Geschwindigkeit und die Distanz zwischen beiden Fahrzeugen einen Unfall realistisch erscheinen lassen. Bei entsprechender Wahrscheinlichkeit wird automatisiert eine Vollbremsung ausgelöst, um den Unfall zu vermeiden oder zumindest die Unfallschwere abzuschwächen. Über 70 % der Lkw-Unfälle sind Auffahrunfälle. Laut diverser Studien könnte eine Ausstattung von Lkw und Bussen mit AEBS jedes Jahr rund 1.000 Straßenverkehrstote sowie 4.000 Schwerverletzte in der EU vermeiden. Die Verbesserung der Verkehrssicherheit ist jedoch nur eine positive Folge der Automatisierung von Nutzfahrzeugen.
Automatisierungsstufen
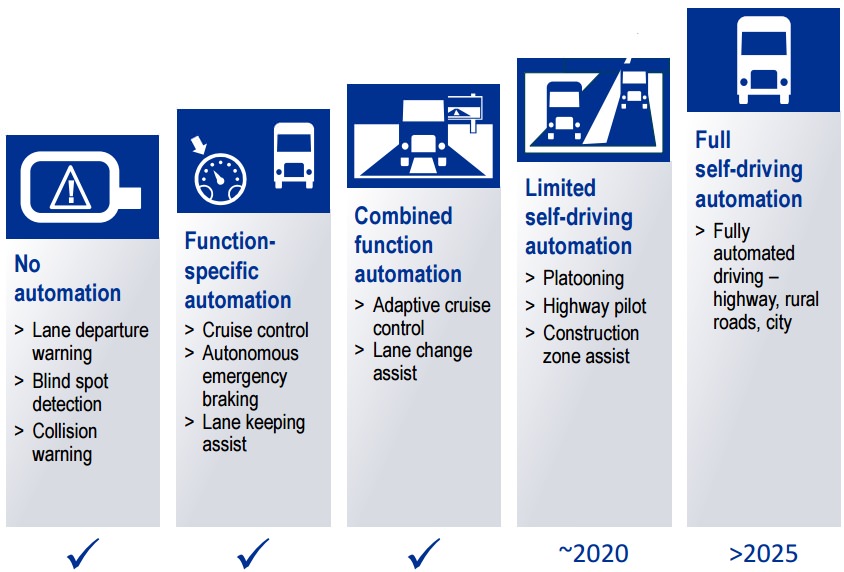
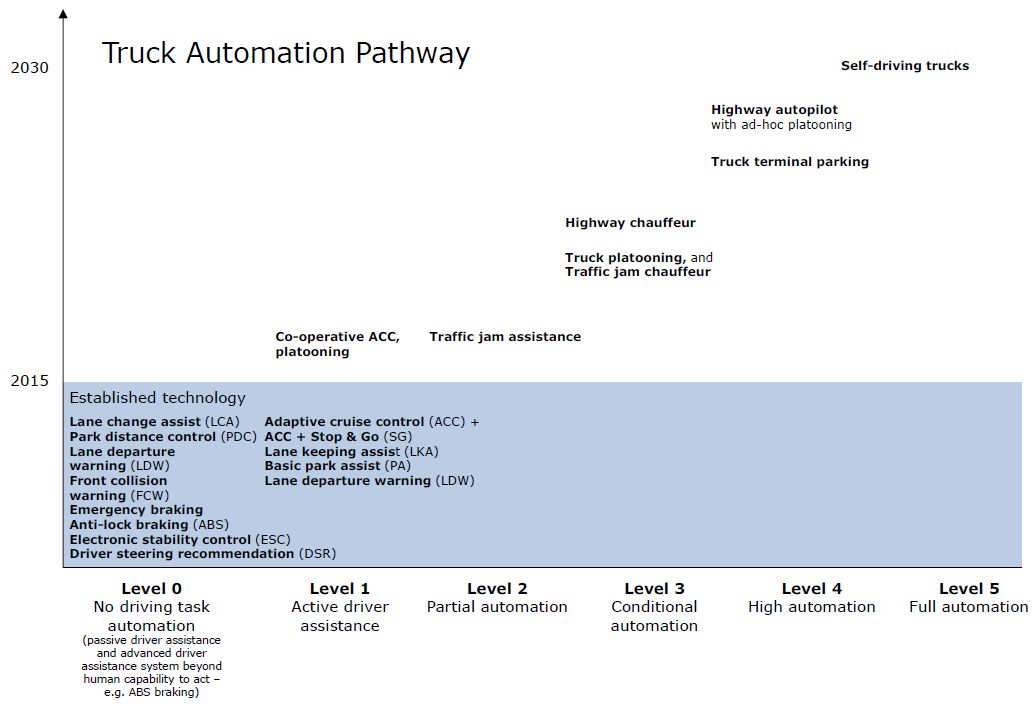
Je nach Automatisierungsgrad lassen sich unterschiedliche Anwendungsszenarien abbilden:
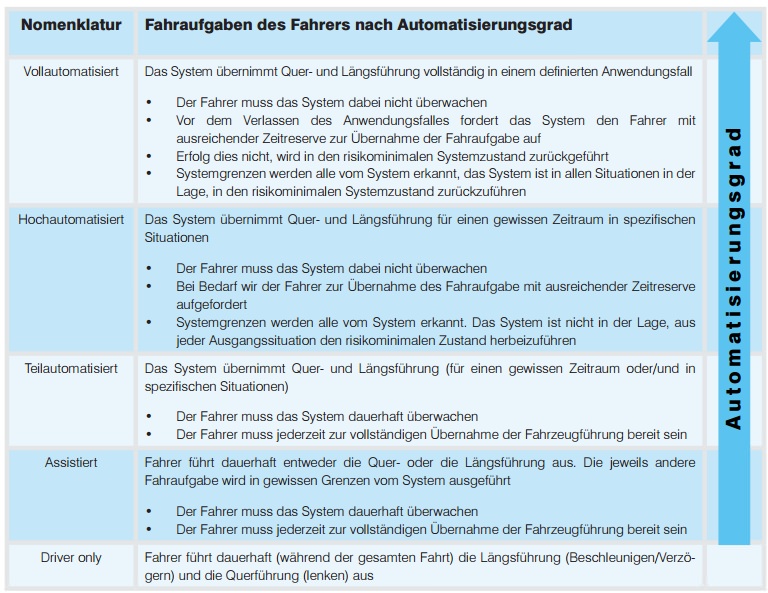
Auf der untersten Stufe (keine Automatisierung) wird der Fahrzeugführer durch unterschiedliche Fahrerassistenzsysteme wie den Spurverlassenswarner, den Totwinkelassistenten oder Kollisionswarner unterstützt. Die zweite Stufe umfasst erste teilautomatisierte Bestandteile wie eine Geschwindigkeitsregelanlage (Tempomat), den vorausschauenden Notbremsassistenten (AEBS) oder den Spurhalteassistenten.
Auf der dritten Stufe werden einzelne Sensoren miteinander kombiniert (Hintergründe zum Thema Fahrzeugumfeldsensorik: LiDAR, Radar, Infrarot, Ultraschall und Video mit ihrer jeweiligen Funktionsweise, Vor- und Nachteilen, Sensordatenfusion). Technische Bestandteile dieser Stufe sind die adaptive Geschwindigkeitsregelanlage (auch: Abstandsregeltempomat, Automatische Distanzregelung (ADR), speziell auch Stauassistent (STA)) und der Spurwechselassistent.
Stufe 4 umfasst das hochautonome Fahren in spezifischen Situationen. Anwendungsbeispiele sind der “Highway Pilot”, welcher Fahrten auf Bundesautobahnen vollständig automatisiert und ohne Eingriff seitens des Fahrers abwickeln kann oder schwierige Fahrmanöver in Baustellenbereichen übernimmt. Hierbei kann beispielsweise eine infrastrukturseitige Ausrüstung von Schildern und Baken sowie von Baustellenfahrzeug einzelnen Fahrzeugen, welche die Baustelle passieren, weitergehende Informationen mitteilen. Eine weitere wichtige Anwendung im NFZ-Bereich ist die Kolonnenfahrt, bei der ein Führungsfahrzeug die Steuerung des gesamten Verbandes übernimmt und mit minimalen Abständen möglichst energieeffizient gefahren werden kann (siehe bspw. SARTRE).
Auf der höchsten Automatisierungsstufe Level 5 agieren Nutzfahrzeuge vollautonom, d.h. das Fahrzeug übernimmt die Quer- und Längsführung vollständig und unabhängig von der jeweiligen Straßenkategorie. Eine Überwachung seitens des Fahrers ist nicht notwendig.
Höhere Wirtschaftlichkeit und Wirkung auf die Arbeitsplätze
Neben der verbesserten Verkehrssicherheit ist insbesondere die höhere Wirtschaftlichkeit ein starkes Argument für die schrittweise Automatisierung des Straßengüterverkehrs.
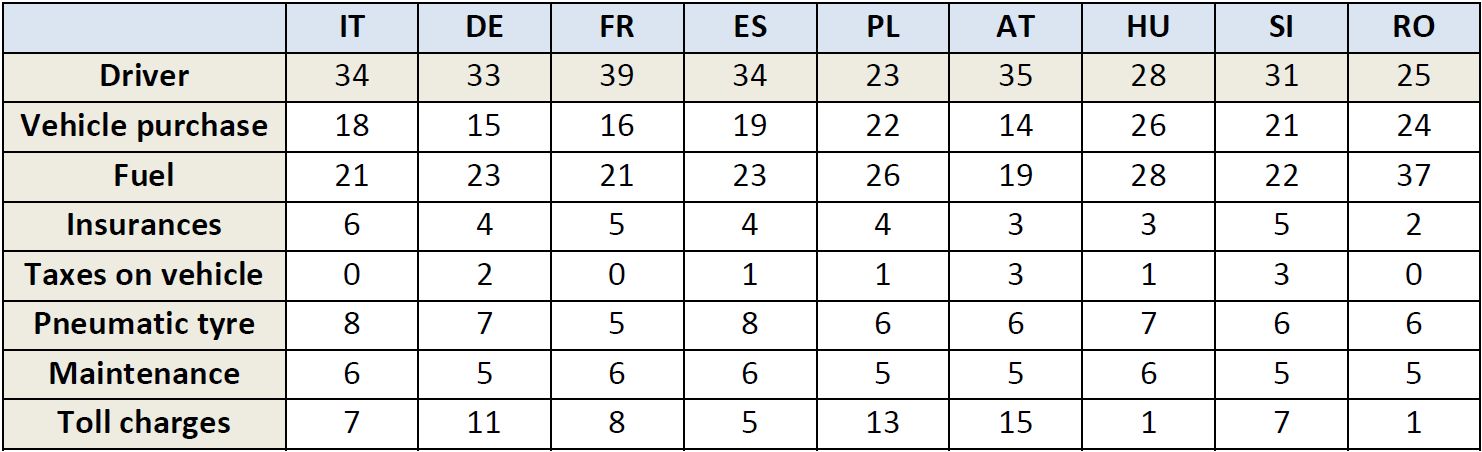
Zwei große Kostenbestandteile des Straßengüterverkehrs sind die Personalkosten sowie die Kraftstoffkosten. Letztere lassen sich durch vorausschauendes Fahren und situationsspezifische Fahrweisen senken. Vehicle2Vehicle-Kommunikation und Vehicle2Infrastructure-Kommunikation können dem Bordrechner die für eine effiziente Fahrstrategie notwendigen Informationen bereitstellen. Dieser kann situationsabhängig und vorausschauend die kraftstoffeffizienteste Fahrstrategie anwenden und den Verbrauch senken. Durch die Verringerung der Fahrzeugabstände kann beim sogenannten Platooning der Luftwiderstand und somit der Kraftstoffverbrauch gesenkt werden. Weitere Einspareffekte entstehen durch die gleichmäßigere Fahrweise.
Die Personalkostenanteile können theoretisch je nach Automatisierungsgrad gesenkt werden. Im Güterkraftverkehr (Fernbereich) machten die Personalkosten in den Jahren 2012 und 2013 etwa 27 Prozent der Gesamtkosten aus – Tendenz steigend (2007: 18,8 %, 2009: 20,4 %). Für die USA lassen sich für die Jahre 2008, 2009, 2010 und 2011 Werte in ähnlicher Höhe feststellen.2 Im europäischen Vergleich lagen die Personalkosten im Jahr 2008 mit Ausnahme (süd)osteuropäischer Staaten in einer ähnlichen Größenordnung von 30 bis 40 Prozent:
Hinzu kommen Restriktionen durch gesetzliche Lenkzeitregelungen und Pausenzeiten, welche die kilometerspezifischen Personalkosten in Abhängigkeit der Fahrweite und der Fahrzeit erhöhen. Im Vergleich hierzu kann ein automatisierter Lkw theoretisch 24 Stunden / Tag durchfahren und somit täglich bis zu 2.000 Autobahnkilometer zurücklegen.
Die Kombination aus wegfallenden Personalkosten, einer höheren Produktivität wegen der wegfallenden Lenkzeitrestriktionen und einer höheren Kraftstoffeffizienz dürfte große ökonomische Effekte auslösen. Die Personalkosten dürften um bis zu 20 % sinken.3 Dies macht den Einsatz automatisierter Nutzfahrzeuge attraktiv.
Es ist zu erwarten, dass eine fortschreitende Automatisierung im Nutzfahrzeugbereich Wirkung im Bereich Beschäftigung entfalten wird und sich der Aufgabenbereich von Lkw-Fahrern verändern dürfte.
Die Intensität und Geschwindigkeit der Veränderungen im Arbeitsmarkt hängt maßgeblich von der Länge der Amortisationsdauer ab. Diese bestimmt sich wiederum durch die den Mehrkosten für die Technologie gegenüberstehenden Einsparungen. Diese sind in erster Linie durch die Reduzierung der Kosten für Fahrer zu erzielen. Ein voll automatisierter, fahrerloser Lkw (Automatisierung der Stufe 5) soll laut einer Studie von McKinsey insbesondere aufgrund reduzierter Personalkosten 35 % weniger Betriebskosten verursachen:
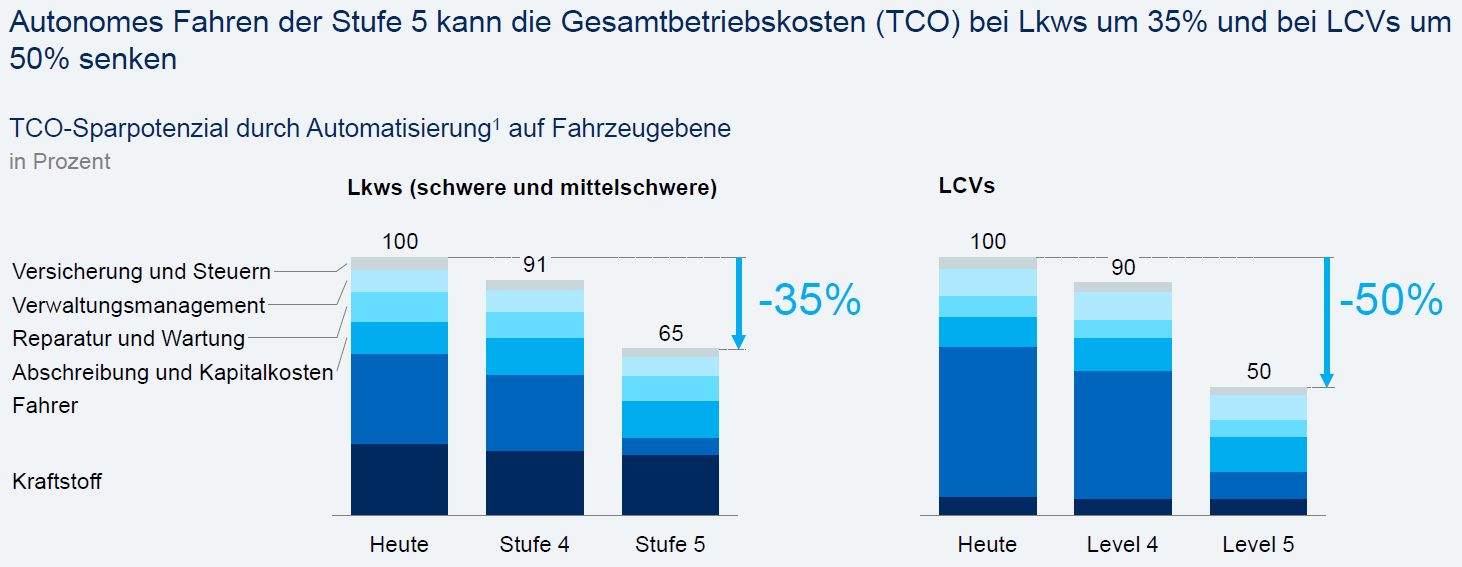
“Da der Erfolg in der Logistikindustrie letztlich von immer niedrigeren TCO [Total Cost of Ownership; Gesamtbetriebskosten] abhängt, zeigen die Fuhrparkbetreiber großes Interesse, die neuen Technologien als Kostensenkungsinstrument einzusetzen.”4 Diejenige Automatisierungstechnologie, die den Fuhrparkbetreibern erhebliche TCO-Einsparungen bringt, dürfte sich auf dem Lkw-Markt am schnellsten durchsetzen. Die größten Einsparpotenziale sind im Personalbereich zu heben. Daher dürfte eine flächendeckende Automatisierung im Straßengüterfernverkehr mit starken Auswirkungen im Beschäftigungsbereich einhergehen.
Eine erste Kostenersparnis dürfte erzielt werden, wenn Fahrer in Lkw mit Automatisierungslevel vier ihre vorgeschriebenen Ruhezeiten einlegen können, während der Lkw autonom weiterfährt. In Phase fünf, wenn Langstrecken-Lkw gar keinen Fahrer mehr benötigen, könnten die Fahrerkosten sogar bis zu 90 Prozent sinken. In diesem Fall nähert sich der Straßengüterverkehr operativ möglicherweise stärker einem Hub and Spoke-System ähnlich des Schienengütereinzelwagenverkehrs an: Lkw verkehren auf der Autobahn unbemannt und autonom, werden auf Lkw-Parkplätzen nahe der Anschlussstellen von menschlichen Fahrern ggf. auch unter Wechsel der Zugmaschine übernommen und unter Zuhilfenahme von teilautomatisierten Sicherheits- und Assistenzsystemen bis zu ihrem Bestimmungsort und wieder zurück bis zur Autobahn gefahren. Ein derartiges Szenario hat Uber im März 2018 skizziert:
Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google – Privacy & Terms.
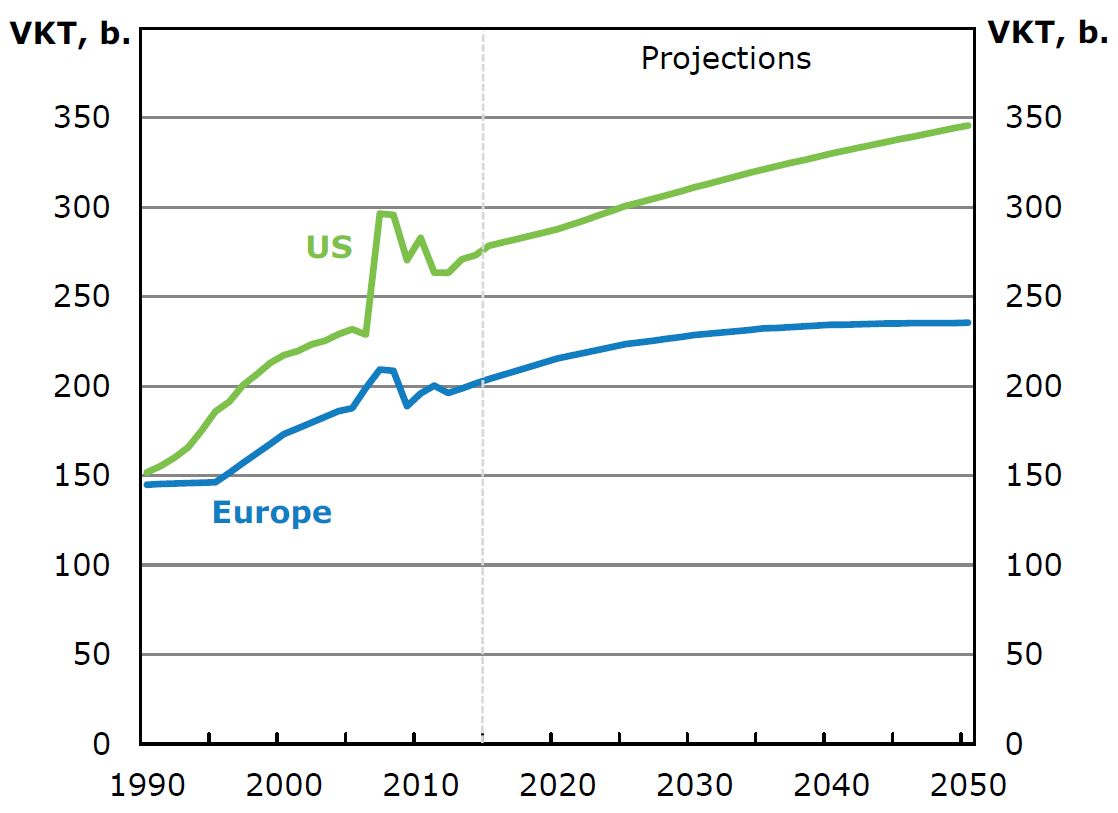
Aufgrund der sinkenden Kosten und der höheren Transportgeschwindigkeit aufgrund wegfallender Pausen- und Ruhezeitrestriktionen dürfte die Nachfrage nach Straßentransporten steigen. In Verbindung mit der hohen Flexibilität des Verkehrsträgers Straße und des Güterstruktureffekts (kleinere, leichtere, dafür hochwertigere Güter) dürften die Güterverkehrsleistung sowie Fahrleistung des Straßengüterverkehrs im Vergleich zu Transporten auf der Schiene und Binnengewässern stark wachsen:
Diese Entwicklung steht unter dem Vorbehalt, dass andere Verkehrsträger keine ähnlichen Kostenvorteile durch eine Automatisierung erzielen dürften (siehe hier: Automatisierung des Bahnbetriebs). Ansonsten dürfte sich der Kostenvorteil verringern bzw. gar aufheben.
Eine weitere Folge sinkender Transportpreise könnte eine Dezentralisierung und stärkere Spezialisierung von Produktionsstandorten sein. Die daraus resultierende steigende Transportintensität könnte sich wiederum in konstanten oder nur leicht sinkenden Endproduktpreisen und einer wachsenden Arbeitskräftenachfrage bspw. für Verkehre auf der letzten Meile äußern.
Ende des Jahrs 2015 belief sich die Zahl der sozialversicherungspflichtig beschäftigten Berufskraftfahrer (Güterverkehr/Lkw) in Deutschland nach Angaben der Bundesagentur für Arbeit auf insgesamt 546.459. In Europa waren 2015 etwa 3,2 Millionen Personen als Berufskraftfahrer beschäftigt. Dies entspricht einem Anteil von 1,5 % der Beschäftigten. Unter 2 % der in diesem Sektor beschäftigten Personen sind weiblich.
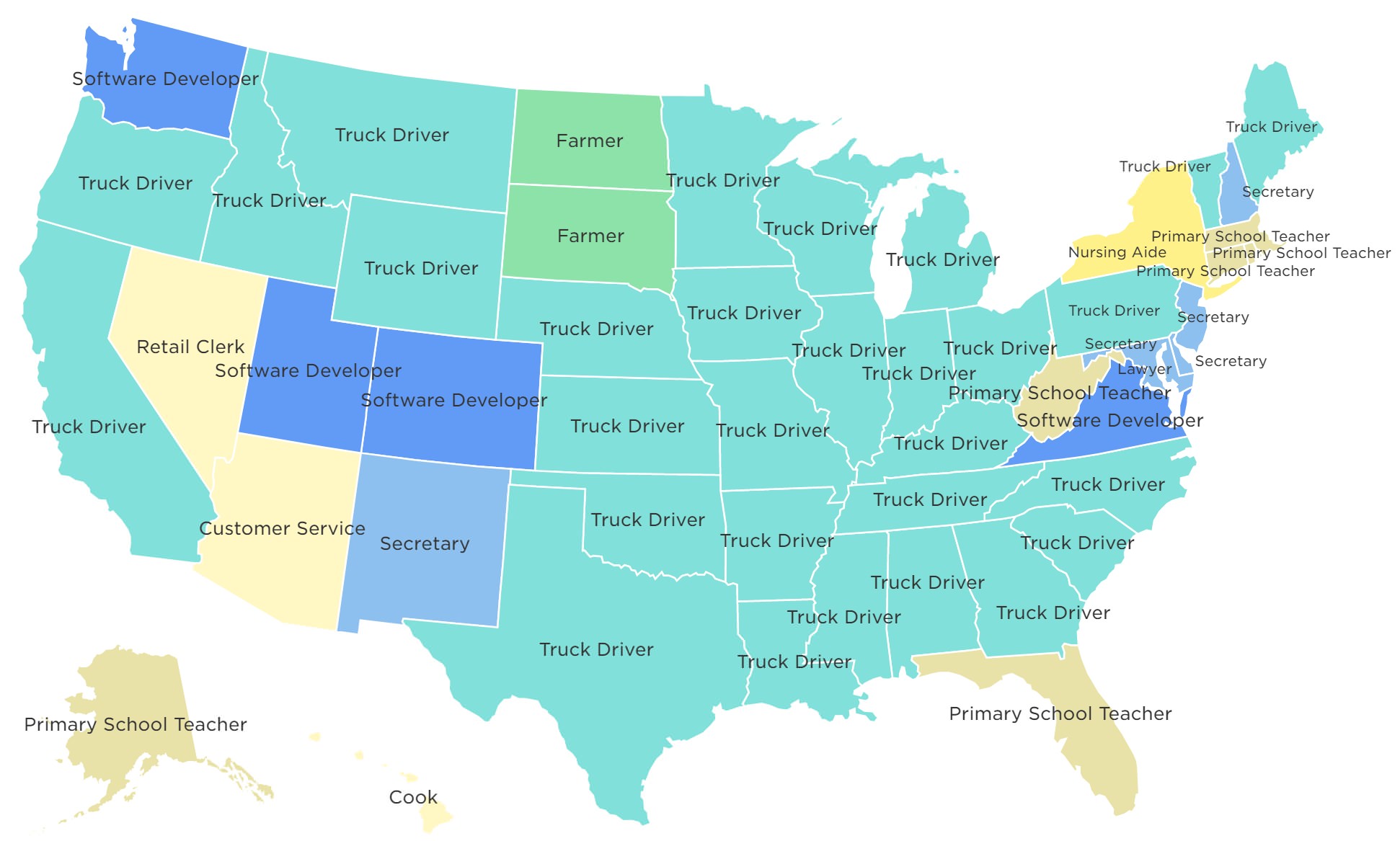
In den USA sind laut American Trucker Association 8,7 Millionen Arbeitsplätze direkt und indirekt mit dem Straßengüterfernverkehr verbunden – 3,5 Millionen als Lkw-Fahrer und 5,2 Millionen in deren Umfeld (Werkstätten, Diner, Tankstellen, Motels etc.). Sie stellen in etwa 1,7 % der gesamten US-amerikanischen Arbeitnehmerschaft und in vielen Bundesstaaten sogar die Gruppe von Arbeitnehmern, in denen die meisten Menschen beschäftigt sind (Anmerkung: die Statistik weist Lkw-Fahrer und Beschäftigte von Kurier- und Paketdiensten in der gleichen Kategorie aus).
Bisher waren Lkw-Fahrer immun gegen zwei dominierende Trends: Globalisierung und Automatisierung. Von Ersterer profitierten sie sogar, da in den letzten Jahrzehnten viele Industriearbeitsplätze aus den USA ins Ausland verlagert wurden und die Waren im Anschluss importiert und mit Lkw transportiert wurden. Durch eine Automatisierung wären diese Jobs, die auch nicht studierten Arbeitskräften ein Mittelstandseinkommen garantiert haben, stark gefährdet.
Die Intensität der Veränderung hängt stark davon ab, welche Automatisierungsebene wann erreicht wird und insbesondere wie lange die Transformation von Level 4 auf Level 5 dauert.
Im Straßengüterfernverkehr könnte eine zunehmende Automatisierung (Level 4) zunächst den Effekt nach sich ziehen, dass die Beschäftigung als Berufskraftfahrer durch das geringere Stresslevel und das höhere Verkehrssicherheitsniveau wieder attraktiver wird. Neben der Verringerung des Fahrermangels könnte ein angenehmeres Arbeitsumfeld auch eine Alternative zu Lohnerhöhungen darstellen. Sinkende oder gleichbleibende Lohnkosten machen den Einsatz zusätzlicher Automatisierungstechnik wiederum unwirtschaftlich und damit unrealistischer.
Ein weiteres Argument für eine Automatisierung ist der drohende Fahrermangel. Auch dieser könnte abgeschwächt oder gar eliminiert werden. Bis 2030 sollen in den USA und Europa 6,4 Millionen Berufskraftfahrer benötigt werden, nur etwa 5,6 Millionen der Stellen dürften besetzt werden können. In den USA dürfte die Zahl der Beschäftigten im Straßengüterverkehr (ohne Automatisierung) bis 2040 von heute 2,4 Millionen auf 2,8 Millionen Lkw-Fahrer wachsen, während die Beschäftigtenzahl in Europa (EU27 plus Norwegen und Island ohne die Schweiz) insbesondere demografiebedingt von 3,2 Millionen auf 2,8 Millionen sinken dürfte.3
Bereits in den letzten Jahren kam es bei Kraftfahrern immer wieder zu Problemen bei Stellenbesetzungen und einem unzureichenden Angebot an qualifizierten Fachkräften. Die wenig attraktive Bezahlung und die schlechten Arbeitsbedingungen haben diesen Mangel mit verursacht. Zudem scheiden in den kommenden Jahren viele Berufskraftfahrer altersbedingt aus dem Berufsleben aus. Die fortschreitende Internationalisierung und die Integration von Informations- und Kommunikationstechnologie (ITK) erhöhen den Spezialisierungsgrad und verändern die Berufsanforderungsprofile. Die Personalkosten dürften perspektivisch steigen. Eine Automatisierung auf Level 4 könnte die Lücke am Arbeitsmarkt schließen helfen und den Beruf des Lkw-Fahrers attraktiver machen.
Im Vergleich zum Automatisierungsgrad 4 könnte es mit Einführung des Automatisierungsgrads 5 und den damit verbundenen nicht bemannten Verkehren zu stärkeren Veränderungen am Arbeitsmarkt kommen. Durch eine Automatisierung könnten 3,4 bis 4,4 Millionen der benötigten 6,4 Millionen Berufskraftfahrer durch Technik abgelöst werden. Neben des Schließens der Arbeitskräftelücke bedeutet dies jedoch auch, dass über zwei Millionen Lkw-Fahrer ihre Jobs verlieren könnten.6
Die Intensität und die Geschwindigkeit der Veränderungen bei Berufskraftfahrern hängen stark von der Durchsetzung automatisierter Funktionen ab. Die gemeinsam vom Europäischen Verband der Automobilhersteller (ACEA), der International Transport Workers’ Federation (ITF) und the International Road Transport Union (IRU), dem Weltverband der Spediteure, unter Führung des International Transport Forum, einer bei der OECD in Paris ansässigen Organisation für globale Verkehrspolitik, erarbeitete Studie “Managing the Transition to driverless road freight transport” widmet sich den Folgen einer Automatisierung des Straßengüterfernverkehrs auf den Arbeitsmarkt.
Betrachtet wurden hierfür drei Szenarien: konservativ, reguliert und disruptiv. Jedes Szenario umfasst ein Jahr, in dem die Technologie breit am Markt eingesetzt wird. Zudem erfolgt die Einführung mit einer unterschiedlichen Intensität. Die Art und Weise der Technologieadaption hat jeweils Wirkung auf den Arbeitskräftebedarf sowie die Zahl der Neueinsteiger.
| Szenario | Jahr der Technologieübernahme | Anteil der durch die Automatisierung abgehaltenen Berufseinsteiger |
|---|---|---|
| Basis | - | 0 % |
| konservativ | 2031 | 50 % |
| reguliert | 2028 | 80 % |
| disruptiv | 2021 | 65 % |
Je schneller sich Automatisierungstechnik (Level 5) im Lkw-Bereich durchsetzt, desto rascher sind Reaktionen am Arbeitsmarkt zu beobachten. Im disruptiven und regulierten Szenario sinkt der Bedarf an Berufskraftfahrern innerhalb weniger Jahre signifikant. Im konservativen Szenario beginnt die Nachfrage ab 2030 zu sinken und stabilisiert sich auf heutigem Niveau.
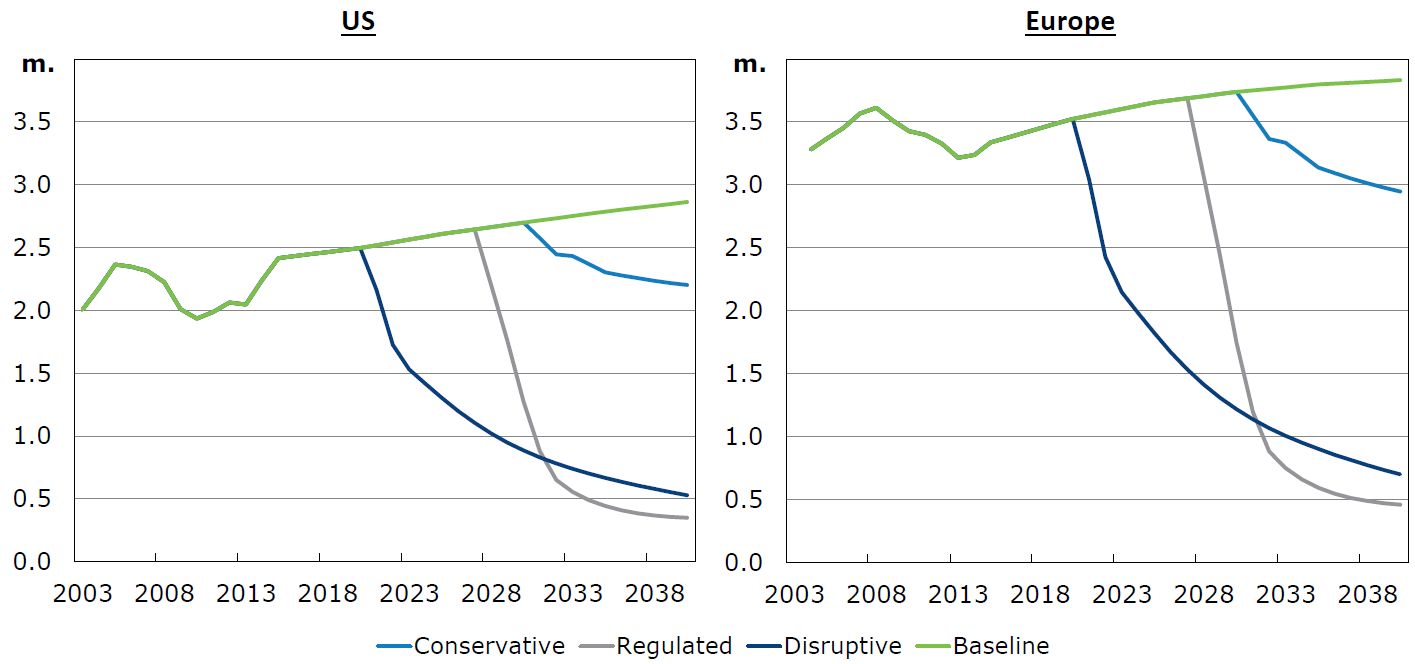
Stellt man dem Bedarf nach Berufskraftfahrern das Arbeitskräfteangebot mi den entsprechenden Reaktionen aufgrund der Technologieeinführung gegenüber, so zeigen sich insbesondere im disruptiven und regulierten Szenario starke Überhänge an Arbeitskräften, mit anderen Worten: Arbeitslosigkeit mit all ihren Folgen. In Europa kann im konservativen Szenario der Arbeitskräftebedarf auch nach Einführung von Automatisierungstechnik nicht gedeckt werden:

Die Prognosen für das disruptive und regulierte Szenario gehen mit einem stark sinkenden Fahrerbedarf einher. Dieser muss jedoch nicht zwingend in einem Arbeitsplatzverlust ähnlicher Größenordnung münden.
Die reine Automatisierung der Fahrbewegungen und der Navigation ist nicht ausreichend, um einen Lkw-Fahrer vollständig ersetzen zu können. Vielmehr gehört hierzu auch die Kommunikation mit Kunden, die Überwachung des Ladungszustands, das Führen entsprechender Protokolle oder die Pflege und Instandhaltung der Fahrzeuge. Nur im Falle einer Automatisierung aller Aufgaben eines Lkw-Fahrers oder einer Restrukturierung der Prozesse, sodass diese von Maschinen durchführbar sind, könnte es zu einem weitestgehenden Ersatz des Menschen durch Roboter / Maschinen kommen.7 Hierbei ist es jedoch nicht nur notwendig, dass die Aufgaben theoretisch automatisierbar sind. Es muss auch wirtschaftlicher sein.8
Parallel zur Automatisierung des Fahrbetriebs dürften neue Berufsfelder und Bedarfe entstehen. Die Umstellung erfordert Personal, welches notwendige Installationen und Instandhaltungsarbeiten durchführt. Die Umplanung von Beschaffungsprozessen und deren Abwicklung erfordert ebenfalls Personal. Zudem ist unklar, ob rechtliche Vorgaben eine menschliche Rückfallebene vorsehen, welche von entsprechenden Überwachungszentralen aus erfolgt.
Die Frage ist jedoch, in welchem Ausmaß ehemalige Berufskraftfahrer in der Branche verbleiben können oder ob sie in großer Zahl branchenfremd neue Arbeit finden müssen. Dies ist insbesondere aufgrund des vergleichsweise niedrigen Bildungsstands schwierig.9 Zudem dürften sich neben Lkw-Fahrern auch Arbeitnehmer aus ähnlichen Berufsfeldern wie bspw. Taxifahrer am Arbeitsmarkt umorientieren müssen.
Hinzu kommt, dass parallel zur voranschreitenden Automatisierung im Straßenverkehr auch der Einsatz von Robotik und additiven Fertigungstechniken im stationären Bereich wachsen dürfte. Dies dürfte zum einen weitere gering qualifizierte Arbeitskräfte freisetzen. Gleichwohl könnte diese Entwicklung Schutz für den Berufsstand des Lkw-Fahrers bedeuten, da eine Automatisierung aufgrund der meist statischen Umweltbedingungen und abgegrenzten Einsatzfelder einfacher umsetzbar sein dürfte als eine Automatisierung des weitaus komplexeren Straßenverkehrs.
Auf der anderen Seite könnte eine Transformation im Straßengüterverkehr rasch erfolgen, da die Forschungsintensität wie auch der Kostendruck in diesem Bereich sehr hoch und die Prozesse im Vergleich zu anderen Branchen weitestgehend standardisiert und homogen sind.
Die Geschwindigkeit der Veränderung sollte daher beobachtet und aufgrund der gesellschaftlichen Bedeutung von Regierungsseite gesteuert werden. Der Report von OECD / ACEA und IRU gibt hierfür vier Empfehlungen zur Ausgestaltung des Übergangs zum fahrerlosen Straβengüterverkehr:10
- Einrichtung eines Übergangsrats mit beratender Funktion speziell zu Arbeitsmarktaspekten;
Regierungen sollten einen Übergangsrat für den Straβengütersektor schaffen, der Vorschläge mit Blick auf die Arbeitsmarktfolgen der Einführung selbstfahrender Lkw unterbreiten würde. Der Auftrag des Gremiums sollte zeitlich begrenzt sein. Repräsentaten der Gewerkschaften, der Speditionsgewerbes, der Fahrzeughersteller und der Regierung sollten vertreten sein. Das Gremium würde die politische Verantwortlichen dabei unterstützen, Maßnahmen so zu wählen, dass Kosten, Nutzen und Risiken der Einführung autonomer Lkw fair verteilt sind. - Schaffung eines temporären Lizenzsystems, um die Geschwindigkeit der Einführung selbstfahrender LKW zu steuern;
Regierungen sollten die Einführung eines Mechanismus’ erwägen, mit dem sich der Übergang zu fahrerlosen LKW gestalten lässt. Ein Lizenzsystem würde es erlauben, die Geschwindigkeit des Übergangs zu steuern. Gleichzeitig würde es finanzielle Mittel verfügbar machen, die für die betoffenen Fahrer eingesetzt werden könnten. Wo vorhandene Arbeitslosenunterstützung als unzureichend erachtet wird, könnte weitere Hilfe in Form gezielter Arbeitsmarktprogramme zur Umschulung von Fahrern geleistet werden. Wo alternative Tätigkeiten durch Automatisierung ebenfalls seltener werden, könnte Hilfe auch in Form zusätzlicher Einkommensunterstützung ausgestaltet werden. Aus Gründen der Fairness sollten die Mittel für Unterstützungsleistungen von den Gewinnern der Einführung selbstfahrender Lkw kommen. Der Verkauf von Lizenzen an Betreiber, die durch fahrerlose Lkw Kostenvorteile erlangen, sollte ergänzt werden durch Beiträge aller Straβennutzer, die von erhöhter Verkehrssicherheit profitieren. Sorgfältiges Design des Lizenzsystems würde sicherstellen, dass es für die Ausgestaltung des Übergangs zu autonomen Lkw eingesetzt wird, und nicht als Vorwand zur Einschränkung des freien Warenverkehrs. - Einführung internationaler Standards, Strassenverkehrsregeln und Fahrzeugspezifikationen für selbstfahrende Lkw;
Harmonisierung der Regeln über Ländergrenzen hinweg ist von entscheidender Bedeutung, um die Vorteile fahrerloser Lkw vollständig nutzen zu können. Gemeinsame Regeln und Betriebsstandards ermöglichen autonomen Lkw nahtlosen Wechsel zwischen Ländern; sie sollten deshalb mindestens auf der Ebene von Kontinenten, vorzugsweise aber weltweit eingeführt werden. Das proaktive Verhalten vieler Regierungen mit Blick auf Tests und Ausnahmegenehmigungen erlaubt es, unterschiedliche Technologien parallel zu testen, was zu ihrer schnelleren Reifung beitragen kann. Allerdings trägt dieser Wettbewerb auch das Risiko in sich, dass das Endziel einer Harmionisierung nicht ausreichend beachtet wird. - Weiterführung von Pilotprojekten mit autonomen Lkw zum Testen von Fahrzeugen, Netzwerktechnologien und Kommunikationsprotokollen.
Regierungen, Industrie und Forschung sollten im Rahmen ausgewiesener Teststrecken weiterhin Versuche auf öffentlichen Straβen vorantreiben, um Fahrzeuge, Netzwerktechnologie und Kommunikationsprotokolle zu testen. Dies erlaubt es, unterschiedliche Ansätze zu testen, ohne sich früh im Entwicklungsprozess auf einen Anbieter, einen Standard oder eine Technologie festzulegen und zu verhindern, dass teure und umfangreiche Investitionen in nicht angemessene Infrastruktur flieβen. Dies trägt dazu bei, dass der durch autonome Lkw geschaffene gesellschaftliche Nutzen voll ausgeschöpft wird.
Die dargestellte Entwicklung ist aufgrund der ihr zugrunde gelegten Annahmen nur eine von vielen möglichen “Zukünften”. Die exakten Wirkungen sind unklar und kaum vorherzusagen. Die Lage am Arbeitsmarkt ist dynamisch und unterliegt vielen weiteren Bindungen. So könnte eine zunehmende Automatisierung eine sinkende Nachfrage nach Personal und diese wiederum ebenfalls sinkende Personalkosten mit sich bringen, welche wiederum Einfluss auf den Grad der Automatisierung haben. Es muss daher nicht zwingend zu starken Verwerfungen am Arbeitsmarkt kommen. Die Entwicklung sollte jedoch eingehend beobachtet werden.
Adaption und Kosten
Die Geschwindigkeit der Veränderung hängen stark von der Kostenstruktur und den Geschäftsmodelle ab. Das Beratungsunternehmen Frost & Sullivan schätzt, dass die Mehrkosten für einen Lkw der Automatisierungsstufe 3 bei 20.000 – 25.000 USD und für Automatisierungsstufe 4 bei über 30.000 USD im Vergleich zu einem konventionellen Lkw liegen. Dies entspricht einem Aufpreis von ~20,0 – 37,5 % je nach Größe und Ausstattungsvariante der Sattelzugmaschine. Da Spediteure in einem einstelligen Margenbereich tätig sind, fehlt ihnen oftmals die Finanzkraft, Flotten umzustellen. Daher könnte es verstärkt zu Leasing- und Flottenmanagementmodellen von Herstellern und spezialisierten Anbietern kommen. Unternehmen könnten leicht höhere Kapitalkosten bei gleichzeitig stark sinkenden Personalausgaben akzeptieren.
Gegebenenfalls werden kleinere und mittlere Transportunternehmen und Spediteure ganz aus dem Markt ausscheiden, da eine Automatisierung und eine damit einhergehende höhere Produktivität größere Unternehmen bevorzugt. Diese dürften darüber hinaus finanzstark genug sein, um Aufpreise bei der Anschaffung neuer Lkw tragen zu können. Größere Unternehmen dürften daher als erstes Automatisierungsfunktionen einsetzen und davon profitieren. Die Kostenvorteile im Betrieb (Personal-, Versicherungs- und Kraftstoffkosten) senken die Transportpreise um bis zu 30 %11 und könnten kleinere Unternehmen aus dem Markt verdrängen. Ebenfalls ist die Rolle von automatisierten Dispositionsplattformen und Frachtbörsen zu beobachten.
Das International Transport Forum geht in seiner Studie von Mehrkosten um die fünf Prozent aus. Mittel- und langfristig könnten die Kosten unter den Preisen heutiger Sattelzugmaschinen liegen, da ab Automatisierungslevel 5 eine veränderte Form von Fahrerkabinen (kleiner, spartanischer, ohne Schlafkabine) möglich wird.12
Frost & Sullivan ist weniger optimistisch und schätzt, dass Einsparungen auch bei einer stärkeren Marktdurchdringung der Automatisierungstechnik in einer Größenordnung von maximal 10 % möglich sind. Weitergehende Einsparungen in diesem Bereich könnten aufgrund der höheren Anforderungen an die IT-Sicherheit und eine redundante Auslegung der Systeme nicht erzielt werden. Dies hat wiederum Einfluss auf die Gesamtkosten eines automatisierten Lkw, welche kostenseitig nicht viel günstiger als manuelle Lkw sein dürften.
Ebenfalls existieren Unsicherheiten über die Restrukturierungskosten. Die Automatisierung des Straßengüterfernverkehrs dürfte mit Änderungen und Anpassungen in der Organisation und Disposition von Verkehren einhergehen. Die Umstellung von Logistikketten und Beschaffungsaufgaben geht mit anfänglichen Kosten einher, welche teilweise durch die Logistikunternehmen zu tragen sind.
Die Geschwindigkeit der Veränderung ist im Straßengüterverkehr aufgrund der für die Verkehrsbranche geringen Fahrzeugwerte und der kurzen Lebensdauer eines Lkw von drei bis zehn Jahren sehr hoch. Neue Technologien kommen daher relativ rasch auf die Straße.
Frisoni et al. (2016) gehen davon aus, dass in zehn bis 20 Jahren Konvoifahrten als Pausenzeiten gelten könnten. Eine weitergehende Automatisierung wird jedoch nicht vor 2035 erwartet.13 Eine Befragung mehrerer Experten durch Underwood (2014) hatte zum Ergebnis, dass die Mehrheit Konvoifahrten (Level 4) ab dem Zeitraum 2025 – 2035 erwartet.14 Zu einem ähnlichen Ergebnis kam TNO (Niederländische Organisation für Angewandte Naturwissenschaftliche Forschung) im Rahmen der European Truck Platooning Challenge 2016.15
Das ITF (2015) schätzt, dass das pilotierte Fahren vor 2030 im Echtbetrieb zur Verfügung stehen könnte (Level 4), während Level 5 ab 2030 zu erwarten ist:16
Die Automatisierung im Nutzfahrzeugbereich wird in mehreren inkrementellen Schritten erfolgen. Zum einen sind diverse technische Probleme zu lösen. Nahezu alle Sensoren erreichen gute und eindeutige Ergebnisse nur bei guten Wetterbedingungen. Eine Unterscheidung zwischen Sand, Schnee und Eis ist nicht möglich. Hinzu kommen diverse Fragestellungen hinsichtlich Zulassung, Haftung und Versicherungsrecht, gesellschaftliche Akzeptanz, etc.
Automatisierte Nutzfahrzeuge – eine Übersicht
Seit 2008 werden erste selbstfahrende Lkw in einem geschlossenen Umfeld wie bspw. Minen erprobt. Ebenfalls forscht das Militär an automatisierten Lkw, um eine Truppenversorgung in gefährdeten Gebieten sicherzustellen. Seit 2014 erproben Nutzfahrzeughersteller und zunehmend neue Anbieter ebenfalls Selbstfahrtechnik im Nutzfahrzeugbereich.
Die folgende Aufstellung soll einen Einblick in die derzeitige Entwicklung geben. Sie beschränkt sich auf den Bereich selbstfahrende Lkw und lässt den Bereich Konvoifahrten / Platooning außen vor. Ebenfalls erhebt sie keinen Anspruch auf Vollständigkeit (Hinweise sind aber gerne in den Kommentaren gesehen).
Militärische Anwendungen: Das Autonomous Mobility Appliqué System (AMAS) von Lockheed Martin
Der militärische Bereich ist bei der Fahrzeugautomatisierung sowohl im Pkw- wie auch im Lkw-Bereich einer der Haupttreiber. Im Rahmen des Autonomous Mobility Appliqué System (AMAS) haben im Jahr 2014 das U.S. Army Tank-Automotive Research, Development and Engineering Center (TARDEC) und Lockheed Martin den automatisierten Betrieb verschiedener militärischer Fahrzeugtypen in unterschiedlichen Umgebungsarten erprobt.

Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google – Privacy & Terms.
Getestet wurde der Einsatz drei fahrerloser taktischer Fahrzeuge bis zu einer Geschwindigkeit von 40 km/h. Diese sollen Gefahren und Hindernisse automatisch umfahren und den normalen Straßenverkehr in urbanen und ländlichen Gebieten meistern. Dies umfasst das Überfahren von Knotenpunkten sowie den Umgang mit anderen Verkehrsteilnehmern, abgestellten Fahrzeugen, Fußgängern und Radfahrern sowie die Bewältigung von Kreisverkehren.
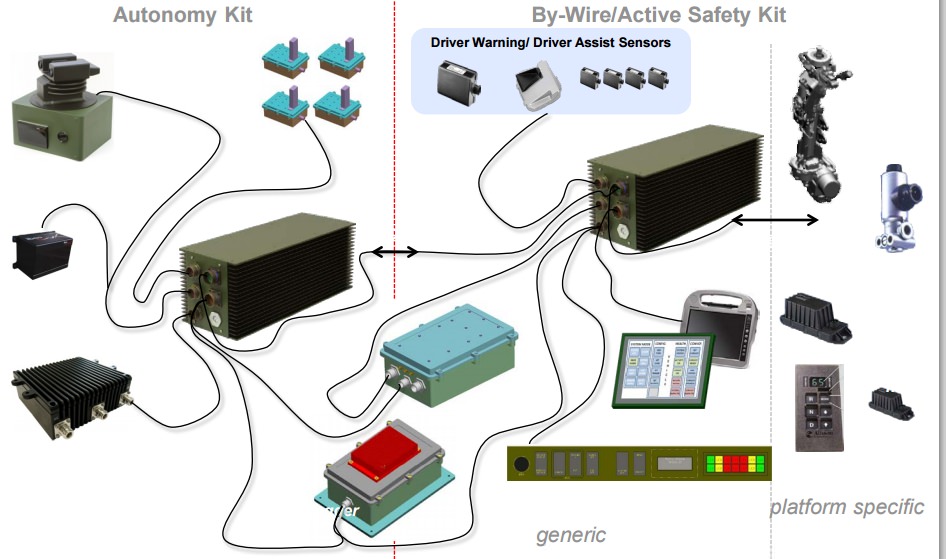
Die AMAS Hard- und Software sind für die Automatisierung im Einsatz befindlicher taktischer Fahrzeuge konzipiert. Das “Unmanned Mission Module” besteht unter anderem aus leistungsfähigen LIDAR-, GPS- und Radar-Sensoren, entsprechenden Verarbeitungsalgorithmen und weiteren Bestandteilen (siehe eingebundene Grafik) und kann als Kit auf praktisch jedem militärischen Fahrzeug eingesetzt werden. Das US-Militär finanzierte die Entwicklung mit elf Millionen US-Dollar.
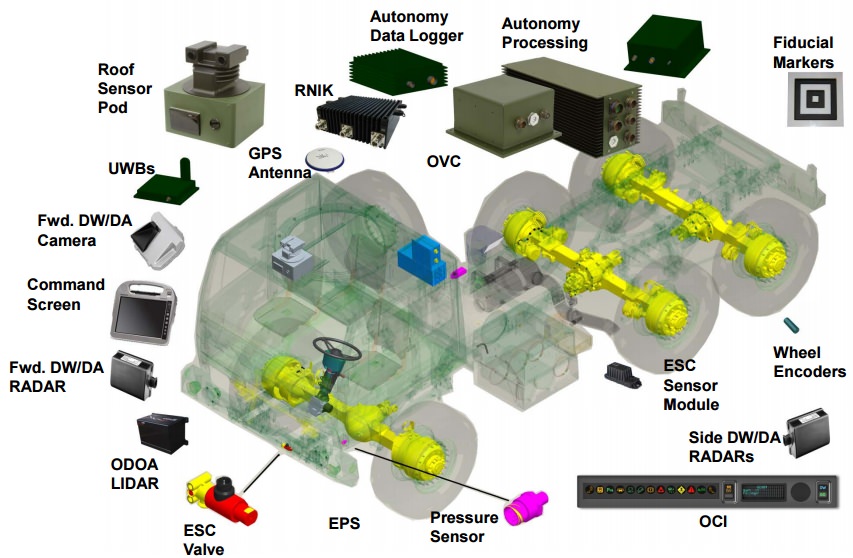
Kernbestandteil des AMAS-Systems ist das sogenannte By-Wire/Active Safety Kit (BWASK), welches als Überwachungs- und Basiseinheit für eine Teilautomatisierung dient. Es soll durch eine Kombination von Stereokameras, nach vorne gerichtetem Fernbereichsradar und einem seitlich und nach hinten gerichtetem Nahbereichsradar das Fahrzeugumfeld abbilden. Ein Kollisionsvermeidungssystem, ein Abstandshalteassistent, ein Fußgängerwarnsystem, ein Spurhalteassistent, ein Notbremsassistent, ein Totwinkelassistent und ein Kreuzungsassistent unterstützen den menschlichen Fahrer beim Fahren. Das BWASK als passives und aktives Sicherheitssystem wurde um AMAS-Funktionalitäten erweitert. Dies ermöglichte zunächst automatisierte Konvoifahrten und im Endzustand das automatisierte Fahren zu zuvor gesetzten Wegpunkten.
Das AMAS-System wurde im Sommer 2014 auf einem Highway in South Carolina erprobt. Die Fahrzeuge erreichten im Konvoi von sechs bis zehn unterschiedlichen Fahrzeugen eine Geschwindigkeit von bis zu 64 km/h.

Einsatz in australischen Rio Tinto-Minen
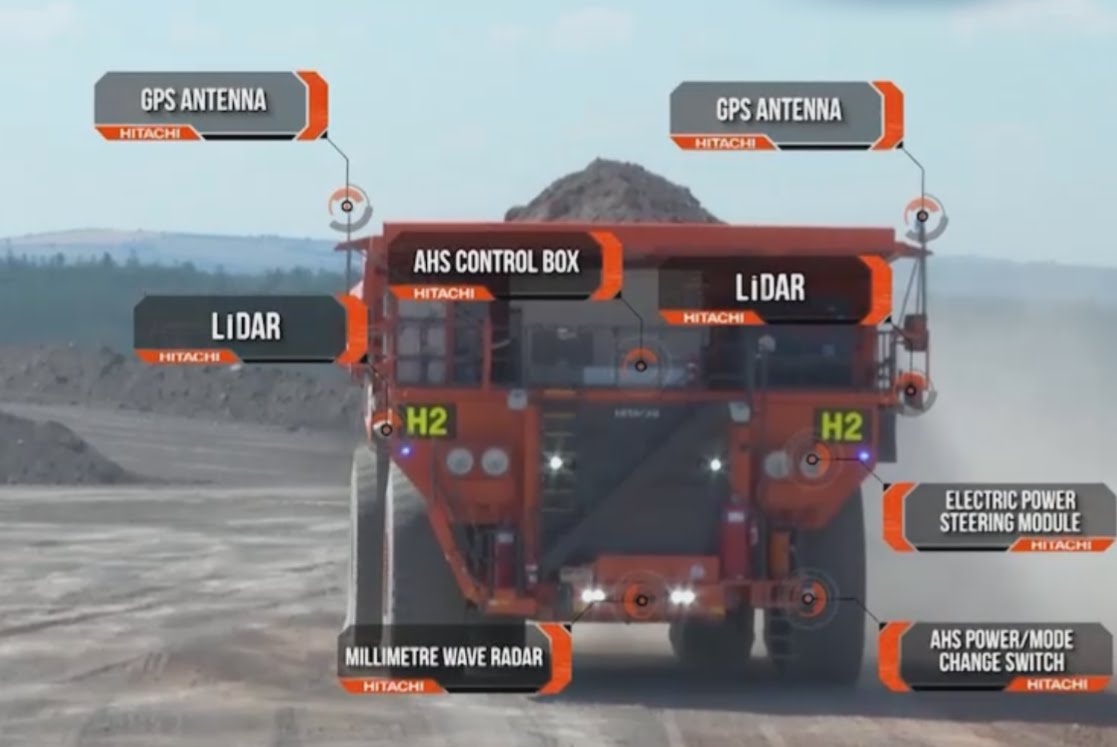
Die internationale Bergbaugesellschaft Rio Tinto begann im Dezember 2008 erste Tests mit automatisierten Lkw im westaustralischen Pilbara. Mittlerweile setzt das Unternehmen im Minenbetrieb 54 automatisierte 240 Tonnen-930E des japanischen Herstellers Komatsu ein. Die Fahrzeuge transportieren jährlich über 50 Millionen Tonnen Material zwischen den Minen Yandicoogina, Nammuldi und Hope Downs. Bis Anfang 2015 wurde eine Fahrleistung von 3,9 Millionen Kilometern erreicht.

Die zwei Stockwerke hohen Lkw operieren in einem geschlossenen Bereich und werden mittels eines hochpräzisen GPS-Systems, eines Hindernisdetektionssystem und eines lokalen WLAN gesteuert. Die Überwachung erfolgt über ein Kontrollzentrum in Perth, welches sich in 1500 Kilometer Entfernung zur Mine befindet. In den kommenden Jahren soll die Flotte auf 150 automatisierte Lkw wachsen.

Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google – Privacy & Terms.
Auch die Komatsu-Konkurrenten Hitachi und Caterpillar haben mittlerweile “Autonomous Haulage Systeme” entwickelt.
Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google - Privacy & Terms.
Von der Automatisierung der Transporte verspricht sich der Bergbaukonzern Rio Tinto mehr Sicherheit und Effizienz. Zudem lassen sich Kosten sparen. So dürften durch die Automatisierung der Lkw und die dadurch wegfallenden Pausen jährlich etwa rund 500 Mannstunden pro Lkw eingespart werden. Darüber hinaus entfallen die Kosten für die Beförderung der Mitarbeiter über mehrere Hunderte Kilometer bis zu den Minenstandorten und die dortige Unterbringung in Camps. Ähnliche Argumente sprechen auch für eine Automatisierung der Eisenerzzüge. Dies wird ebenfalls von Rio Tinto in Australien erprobt.

Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google - Privacy & Terms.
Mercedes-Benz Future Truck 2025 / MB Actros mit Highway Pilot (Europa)
Im Juli 2014 hat Daimler den Mercedes-Benz Future Truck 2025 erstmals der Öffentlichkeit präsentiert. In diesem werden bereits heute im Einsatz befindliche Assistenz- und Telematiksysteme zu einem Multisensorsystem namens “Highway Pilot” vereint.
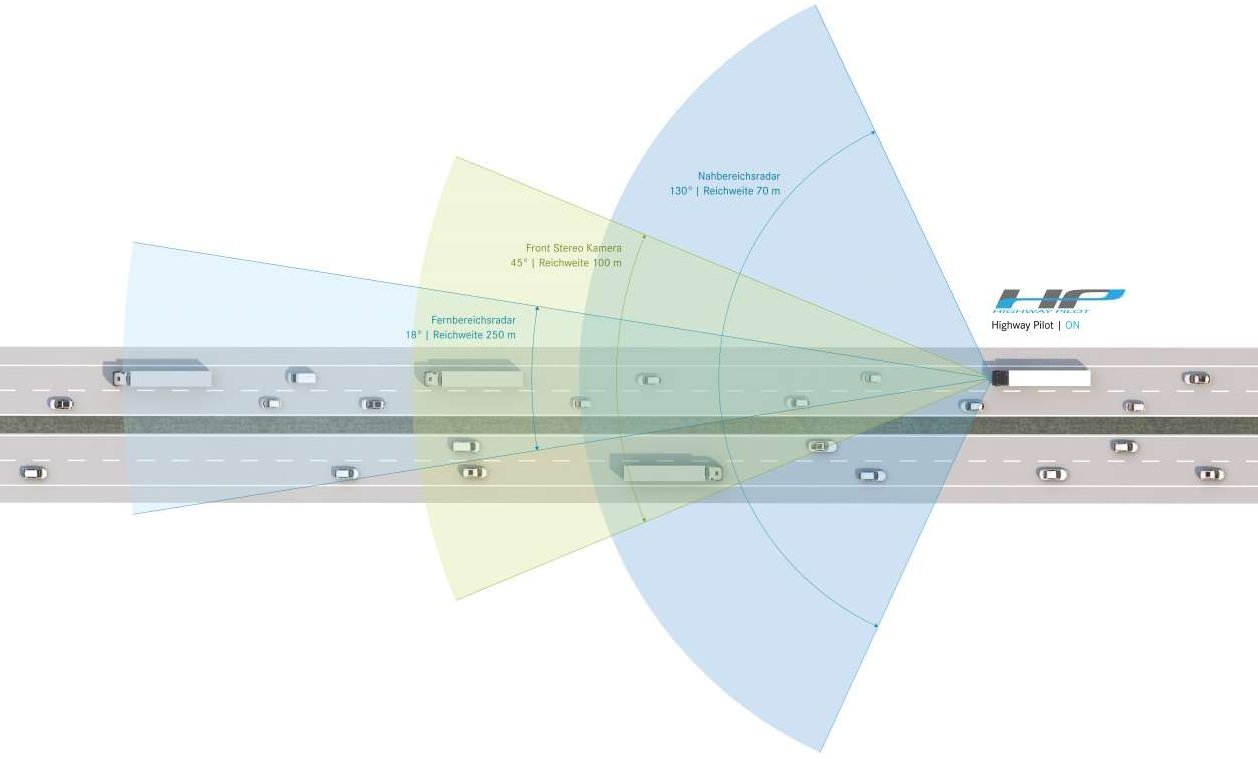
Das System besteht aus Stereokameras mit einer Reichweite von 100 m und einem Erfassungswinkel von 45°, einem Fernbereichsradar mit einer Reichweite von 250 und einem Erfassungswinkel von 18°, einem Nahbereichsradar mit einer Reichweite von 70 m und einem Erfassungswinkel von 130°, einem Flankenradar auf beiden Seiten mit einer Reichweite von 60 m und einem Erfassungswinkel von 170° sowie mehreren Assistenzsystemen (u.a. Abstandshalteassistenten, Notbremsassistenten Active Brake Assist 3, Spurhalteassistent). Die Radarsensoren werden seit 2008 getestet, die Stereokameras seit 2011 in Lkw eingesetzt (weitere Hintergründe zum Thema Fahrzeugumfeldsensorik). Ziel ist ein teilautomatisierter Fahrbetrieb auf Autobahnen.
Sollte das Fahrzeug aufgrund schlechter Wetterbedingungen oder mangelhafter Fahrbahnmarkierung Probleme bei der Umfelderkennung haben, fordert das System den Fahrer auf, wieder selbst zu lenken. Der Fahrer habe dazu laut Daimler Trucks ausreichend Zeit.

Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google - Privacy & Terms.
Im Oktober 2015 absolvierte ein umgerüsteter Mercedes-Benz Actros auf der Autobahn A8 zwischen Denkendort und dem Flughafen Stuttgart medienwirksam die erste Fahrt eines automatisierten Lastwagens über eine öffentliche Straße in Deutschland.
Der Lkw ist gemäß § 19/6 StVZO als Versuchsfahrzeug zugelassen und durch den TÜV Rheinland überprüft worden. Auf Grundlage des TÜV-Gutachtens erteilte das Regierungspräsidium Baden-Württemberg eine Ausnahmegenehmigung gemäß § 70 StVZO. Mit dieser Genehmigung darf der Lkw nun bundesweit mit einer Geschwindigkeit von bis zu 80 km/h auf Autobahnen teilautomatisiert fahren.
Laut Daimler-Nutzfahrzeugvorstand Wolfgang Bernhard sollen die “Roboter-LKW” 2025 serienreif werden.
Freightliner Inspiration Truck (USA)
Der US-Nutzfahrzeughersteller Freightliner, seit 1981 Teil des Daimler-Konzerns (Daimler Trucks North America), wirbt mit dem Freightliner Inspiration Truck ähnlich wie die deutsche Mutter für seine Fahrzeugautomatisierungstechnik für den Lkw-Bereich.
Am 5. Mai 2015 legte auf dem Hoover Dam im US-Bundesstaat Nevada ein rund 26 Meter langer und über 30 Tonnen schwerer LKW auf Basis des US-Serienmodells Freightliner Cascadia Evolution, der mit dem Detroit Connect (bordeigenes Diagnose- und Flottenüberwachungssystem) und der Highway Pilot Technologie ausgestattet ist, medienwirksam seine erste öffentliche Fahrt zurück. Zuvor war die Technik 16.000 Kilometer weit auf einem Testgelände in Papenburg und auf anderen abgesperrten Strecken getestet worden. Freightliner hat vom US-Bundesstaats Nevada eine Lizenz erhalten, die “Highway Pilot”-Technik im öffentlichen Straßenverkehr rund um Las Vegas zu testen.

Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google – Privacy & Terms.
In den USA führt Freightliner bereits Fahrertrainings und einen Zertifizierungsprozess für das Fahren des Inspiration Trucks durch. Hierfür müsse das Fahrerpersonal bestimmte Voraussetzungen erfüllen:
- Teilnahme am Fahrertraining
- Kenntnis über die Funktionsweise des Systems muss nachgewiesen werden
- Kenntnis über Aktivierung und Deaktivierung und Erkennen des automatisierten Fahrmodus muss vorhanden sein
- Fahrer muss nachweisen, dass er den manuellen wie automatisierten Betrieb beherrscht
- Reaktionszeit bei Systemfehler muss bei einer halben Sekunden oder niedriger liegen
- Fehlfunktionen müssen in weniger als 2,5 Sekunden durch den Fahrer korrigiert werden
- Verlassen des Fahrstreifens muss innerhalb von 2 feet (~60 cm) durch den Fahrer korrigiert werden
Daimler und Freightliner betonen, dass der Fahrer in absehbarer Zukunft nicht überflüssig gemacht werden soll. Er müsse mindestens noch eine Dekade lang die autonome Fahrt kontrollieren und ggf. eingreifen. Während dieser Zeit könne er sich bspw. um die Warendisposition kümmern. Zudem lasse die geringere Belastung den Fahrer länger aufmerksam bleiben, sodass er länger fahren und mehr Einkommen generieren könne:

Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google – Privacy & Terms.
Ob dieses Szenario in dieser Form eintritt oder nur zur Beruhigung von Berufskraftfahrern und deren Standesvertretung vermittelt wird, wird zu beobachten sein. Die Wirkungen einer Automatisierung im Nutzfahrzeugbereich sind komplex und vielschichtig und daher nicht einfach zu beschreiben. Eine breite Anwendung von Automatisierungstechnik und deren Einbau in Fahrzeuge mit den verbundenen Mehrkosten für die zusätzliche Technik dürfte nicht ohne Reduktion der kilometerspezifischen Lohnkosten bzw. der Vollkosten erfolgen (siehe Abschnitt “Wirtschaftlichkeit”). Für eine weitergehende Auseinandersetzung mit den möglichen Beschäftigungswirkungen selbstfahrender Nutzfahrzeuge siehe den Abschnitt “Beschäftigungswirkung” in diesem Artikel.
Waymo
Waymo, ein Unternehmen der Google-Konzernmutter Alphabet, hat bestätigt, ebenfalls an selbstfahrenden Lkw zu arbeiten. Mitte 2017 führte man erste Tests durch. Testträger schien ein Peterbilt 579 zu sein, welcher mit einem LIDAR-Sensor, vier Ultraschallsensoren und einem Radarsensor an der Stoßstange ausgestattet wurde.
Die notwendige Technik wurde aus dem Pkw-Bereich auf den NFZ-Bereich sowohl software- wie auch hardwareseitig übertragen. Insbesondere im Softwarebereich kann man so auf die mit automatisierten Pkw im realen Straßenverkehr zurückgelegten fünf Millionen Meilen wie auch die im Rahmen von Simulationen zurückgelegten fünf Milliarden Meilen zurückgreifen.

Über das Jahr 2017 hinweg hat Waymo die automatisierten Lkw in kleineren Versuchen in Kalifornien und Arizona getestet. Seit Anfang März 2018 werden die Lkw auf öffentlichen Straßen der US-Ostküstenstadt Atlanta (Georgia) getestet und transportieren hier Ausrüstung zwischen zwei Google-Datenzentren.
Otto / Uber
Die ehemaligen Google-Entwickler Anthony Levandowski, Lior Ron, Claire Delaunay und Don Burnette gründeten im Januar 2016 Otto (voller Name Ottomotto LLC). Das Unternehmen entwickelt Hardware-Kits, welche Lkw mit Radarsensoren, Kameras und Lasersensoren nachrüsten. Der Lkw soll selbstständig die Spur und Geschwindigkeit halten und falls notwendig die Geschwindigkeit verlangsamen bzw. vollständig abbremsen können. Ein automatisierter Spurwechsel ist zunächst nicht möglich.

Ziel des Systems ist es laut Selbstbeschreibung, den Fahrer von Aufgaben zu entlasten. Er solle in der Fahrerkabine schlafen können, während der Lkw weiter fahre. Die maximale Lenkzeit von elf Stunden solle somit verlängert werden. Mittelfristig dürfte aber auch hier der voll automatisierte Betrieb geplant sein.

Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google – Privacy & Terms.
Im August 2016 übernahm der Fahrdienst Uber Otto zum Kaufpreis von 680 Millionen US-Dollar.
Nach der Übernahme führte Uber im Oktober 2016 werbewirksam die weltweit erste kommerzielle Lieferung mit einem selbstfahrenden Fahrzeug durch. 51.744 Dosen Bier wurden für den Getränkehersteller Anheuser-Busch 120 Meilen (rund 193 Kilometer) auf einer Autobahn im Bundesstaat Colorado transportiert. Für die Fahrt auf der I-25 von Fort Collins über Denver nach Colorado Springs wurde die Strecke extra vermessen, der Transport wurde zudem durch die Polizei gesichert.

Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google – Privacy & Terms.
Im März 2018 gab Uber bekannt, in Arizona seit November Fracht für Kunden mit automatisiert fahrenden Trucks zu transportieren. Am Steuer befand sich jeweils ein Lkw-Fahrer, welcher die sichere Fahrt überwachte. Das Unternehmen gab jedoch nicht bekannt, wie viele Lkw eingesetzt wurden und welche Fahrleistung diese zurücklegten. Ebenfalls ist unbekannt, wie häufig in das System korrigierend eingegriffen werden musste.
Uber fokussiert sich mit seinen selbstfahrenden Lkw auf die Highway-Abschnitte, die Fahrt über Nebenstraßen und in städtischen Bereichen soll weiterhin vom Menschen durchgeführt werden. Über die Einrichtung von Umschlaghubs soll die effiziente Übergabe der Auflieger abgewickelt werden. In Arizona ist ein Terminal in Sanders nahe der Grenze zu New Mexico und in Topock nahe der kalifornischen Grenze errichtet worden.

Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google – Privacy & Terms.
TuSimple / Peking Tucson Future Technology Co., Ltd
TuSimple, ein Unternehmen mit Sitz in San Diego und Peking arbeitet mit einem großen chinesischen Nutzfahrzeughersteller an der Entwicklung automatisierter Lkw mit Fokus auf den chinesischen Markt. Die Tests werden großteils in China durchgeführt, da dort geringe bis keine Restriktionen für Tests existieren.
https://www.youtube.com/watch?v=6KIpnNwweQo
Das Unternehmen setzt stark auf Computer Vision und Deep Learning. Dafür sammelt TuSimple Daten von manuell auf der Straße fahrenden Lkw. Die Lkw sollen mit neun Kameras und Millimeterwellenradar ausgestattet werden. Der Verkehr kann in bis zu 200 Meter Entfernung erfasst werden.

Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google – Privacy & Terms.
Die Technologie soll im Rahmen einer kommerziellen Anwendung erstmals 2018 im Straßenverkehr getestet werden.
Seit Juni 2017 darf Tucson unbemannte Straßentests in Kalifornien durchführen. Erste Testfahrten wurden bereits im Juni 2017 zwischen San Diego und dem Süden von Arizona durchgeführt.
Royal Truck and Equipment
Der US-Nutzfahrzeugumrüster und Aufbautenproduzent Royal Truck and Equipment aus Pennsylvania hat mit den Truck Mounted Attenuator (TMA) Trucks spezielle Lkw für den Baustellenbereich entwickelt. Der primäre Fokus liegt auf der Absicherung von Personen im Baustellenbereich insbesondere bei Bauarbeiten auf viel befahrenen Straßen.
Laut Federal Highway Administration kam es 2015 in den USA zu 96.626 Baustellenunfällen. Dies entspricht einem Unfall alle 5,4 Minuten. Jeden Tag sind rund 70 verletzte Personen zu verzeichnen, jede Woche sterben rund 12 Personen. Etwa 48 % der Todesfälle gingen 2014 auf Überfahren durch ein Fahrzeug und 14 % auf Kollisionen zwischen Fahrzeugen und Baustellenfahrzeugen / mobilen Baustelleneinrichtungen zurück. TMA-Fahrzeuge sollen die Zahl dieser Unfälle reduzieren.

Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google – Privacy & Terms.
Durch den Einbau von Technik zur Fahrzeugautomatisierung von Kratos Defense (Hardware und Software) soll die Baustellensicherheit weiter erhöht werden. Wichtiges Element ist die “follow me”-Funktion. Der Lkw kann einem Führungsfahrzeug automatisiert in einem Abstand von bis zu 175 feet (~53 Meter) folgen. Die Fahrbewegungen werden mit einer Genauigkeit von 2,5 – 7,5 cm gespiegelt. Insbesondere auf temporären Autobahnbaustellen oder bei Instandhaltungsarbeiten wie dem Mähen des Banketts ist dies sinnvoll.
Das automatisierte Fahrzeug befindet sich unbemannt am Ende des Konvois und ist mit speziellen Crashelementen ausgestattet. Bei Auffahrunfällen befindet sich das Fahrzeug als Puffer vor bemannten Fahrzeugen bzw. Personen außerhalb der Fahrzeuge. Bislang müssen Sicherheitsfahrzeuge noch besetzt sein, um im Falle eines Unfalls die Bremsen zu betätigen und ein Weiterrollen des Fahrzeugs zu verhindern. Die Rolle des Menschen soll durch den selbst übernommen werden,
Das Prinzip verdeutlicht das folgende Video ab Minute 5:24:

Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google – Privacy & Terms.
Die Fahrzeuge wurden seit 2016 auf Straßen in Florida und seit August 2016 in Kooperation mit dem französischen Baukonzern COLAS in London und dem umliegenden Autobahnnetz getestet. Sie waren jeweils mit Testfahrern bemannt.

Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google – Privacy & Terms.

Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google – Privacy & Terms.
Foton / Baidu
Der chinesische Suchmaschinenhersteller Baidu und der chinesische Nutzfahrzeughersteller Foton (Beiqi Foton Motor Co., Ltd.) arbeiten ebenfalls an der Entwicklung automatisierter Lkw.
Der Lkw mit der Bezeichnung „Super Truck“ erreicht einen Automatisierungsgrad zwischen Level 3 und 4. Die Kameras sollen Stand 2016 mit einer 90-prozentigen Genauigkeit Objekte erkennen können. Fußgänger sollen mit einer Präzision von 95 Prozent und Lichtsignalanlagen mit einer Genauigkeit von 99,9 Prozent erkannt werden.

Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google – Privacy & Terms.
Embark
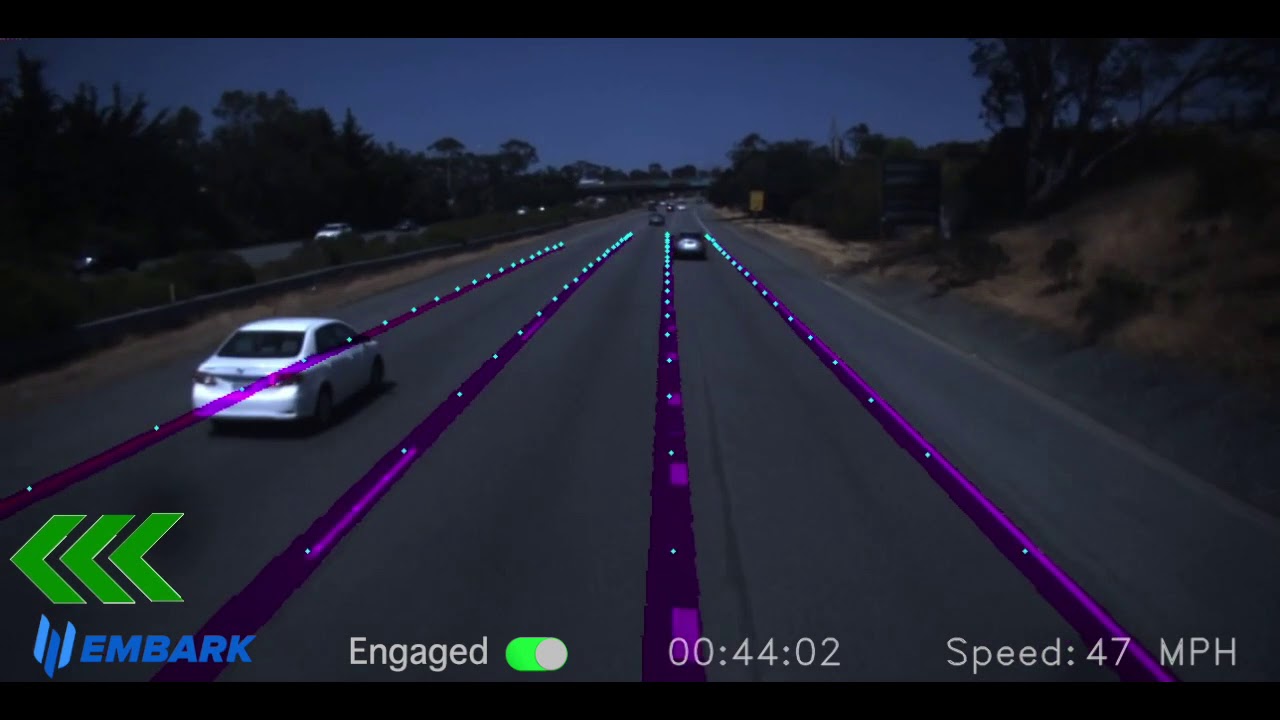
Das 2016 gegründete US-Startup Embark (San Francisco) fokussiert sich bei seiner Automatisierungstechnik nicht auf hochauflösende detaillierte Karten, sondern auf Sensordaten und Maschinenlernen. Die Daten werden mittels Velodyne LiDAR, optischen Kameras und Radarsensoren gewonnen und direkt im Fahrzeug mittels mehreren Nvidia GPUs und anderen Komponenten verarbeitet. Laut Einstufung des kalifornischen Verkehrsministeriums wird so ein SAE Level 2-Autonomiegrad erreicht. Embark rechnet damit, dass die Technologie Anfang der 2020er Jahre Marktreife erreicht.

Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google – Privacy & Terms.
Peterbilt-Lkw mit Embark-Technologie legten bislang im öffentlichen Straßennetz Strecken von 650 Meilen von El Paso, Texas) nach Pal Springs, Kalifornien, (Fracht: Kühlschränke) und im Februar 2018 2.400 Meilen von Los Angeles nach Jacksonville, Florida zurück. Die Fahrten sollen jeweils zu großen Teil vollautomatisiert stattgefunden haben. Menschliche Eingriffe und Korrekturen sollen jeweils nur wenige Sekunden gedauert haben.
In einem 2017 veröffentlichten Video zeigte Embark eine über 100 Meilen lange vollautomatisierte Fahrt mit Fahrstreifenwechseln und dem Auf- und Abfahren auf den Highway ohne einen einzelnen Korrektureingriff:
Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google – Privacy & Terms.
Starsky Robotics
Das US-Startup Starsky Robotics hat seine Selbstfahrtechnologie erstmals im August 2016 auf einem Betriebsgelände in Georgia und im Februar 2017 auf einem US-Highway erprobt.

Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google – Privacy & Terms.
Im Februar 2018 erfolgte eine Fahrt ohne Menschen an Bord auf einer sieben Meilen langen gesperrten Straße in Florida.

Um ihre persönlichen Daten zu schützen, wurde das Laden des YouTube-Videos und die damit verbundene Datenweitergabe an YouTube geblockt.
Klicken Sie auf Video laden, wenn Sie das Video aufrufen möchten.
Mit Aufruf des Videos akzeptieren Sie die Datenschutzbedingungen von Youtube.
Informationen hierzu können Sie hier abrufen: Google – Privacy & Terms.
Ziel von Starsky sind Lkw-Transporte ohne Fahrer an Bord. Die Fahrzeuge sollen vielmehr aus der Ferne überwacht werden. Pro Bedienplatz könnten 20 bis 30 Fahrzeuge betreut werden.
Bei Hinweisen auf weitere Systeme oder für Aktualisierungen der hier vorgestellten Systeme freue ich mich über einen Kommentar im Kommentarbereich unter diesem Artikel.
Quellen
- Evers, Claudia und Auerbach, Kerstin (2005): Verhaltensbezogene Ursachen schwerer Lkw-Unfälle. Berichte der Bundesanstalt für Straßenwesen. M174. Bremerhaven: Wirtschaftsverlag NW. Bericht als PDF ↩
- American Transportation Research Institute 2012: An Analysis of the Operational Costs of Trucking – 2012 Update. September 2012. St Paul & Atlanta, S. 11 ↩
- OECD/ITF, ACEA und IRU 2017: Managing the Transition to driverless road freight transport, S. 31f. ↩
- McKinsey (2016): Delivering Change – Die Transformation des Nutzfahrzeugsektors bis 2025, S. 21 ↩
- OECD/ITF, ACEA und IRU 2017: Managing the Transition to driverless road freight transport, S. 31f. ↩
- OECD/ITF, ACEA und IRU 2017: Managing the Transition to driverless road freight transport, S. 38 ↩
- Frey, C.; Osborne, M. 2017: The Future of Employment: How susceptible are jobs tocomputerisation?. Technological Forecasting and Social Change, Vol. 114, S. 254-280. ↩
- Autor, D.; Levy, F.; Murnane, R. 2003: The Skill Content of Recent Technological Change: An Empirical Exploration. The Quarterly Journal of Economics. Vol. 118/4, S. 1279-1333 ↩
- Hogarth, T.; Wilson, R. 2015: The outlook for skills demand and supply in Europe. In: Dolphin, T. (Hrsg.): Technology, globalisation and the future of work in Europe: Essays on employment in adigitised economy. Institute for Public Policy Research, London, S. 17-24. ↩
- OECD/ITF, ACEA und IRU 2017: Managing the Transition to driverless road freight transport, S. 56f. ↩
- OECD/ITF, ACEA und IRU 2017: Managing the Transition to driverless road freight transport, S. 22 ↩
- OECD/ITF, ACEA und IRU 2017: Managing the Transition to driverless road freight transport, S. 20f. ↩
- Frisoni, R.; Dall’Oglio, A.; Nelson, C.; Long, J.; Vollath, C.; Ranghetti, D.; McMinimy, S.; European Parliament, Directorate-General for Internal Policies of the Union und Steer Davies Gleave 2016: Research for TRAN-Committee: self-piloted cars : the future of road transport? Europäisches Parlament. Brüssel. ↩
- Underwood, S. 2014: Automated vehicles forecast, vehicle symposium opinion survey. Präsentation auf dem Michigan Connected and Automated Vehicle Working Group Meeting, 09.10.2014 ↩
- Janssen, R. et al. 2015: Truck platooning: Driving the future of transportation. TNO. Delft ↩
- ITF 2015: Automated and Autonomous Driving: Regulation under Uncertainty. InternationalTransport Forum Policy Papers. Nr. 7. OECD Publishing: Paris, S. 23f. ↩









{kind=link}
Automatisierung des Straßengüterfernverkehrs | Zukunft Mobilität
https://esseepankki.proakatemia.fi/en/agustin-gutierrez-v-how-to-avoid-the-abandoned-cart-in-your-ecommerce/
Automatisierung des Straßengüterfernverkehrs | Zukunft Mobilität
http://www.wpalife.org/2020/05/19/the-cares-act/
Automatisierung des Straßengüterfernverkehrs | Zukunft Mobilität
https://vermontevaporator.com/diy-maple-syrup-101-making-filtering-and-storing-syrup/
Vielen Dank für den tollen Beitrag. Ich finde es toll, dass nach einer Betrachtung der Wirkung selbstfahrender Lkw hinsichtlich Effizienz / Wirtschaftlichkeit, Vernetzung, ökologischer Verträglichkeit und Verkehrssicherheit, näher auf mögliche Auswirkungen auf dem Arbeitsmarkt eingegangen wird. Ich beschäftige mich beruflich sehr viel mit Nutzfahrzeugen und bin natürlich gespannt, wie sie sich mit der Zeit verändern werden. Momentan benötigen wir neue Fahrzeuge und suchen deswegen einen Hersteller von Nutzfahrzeugen in Österreich.